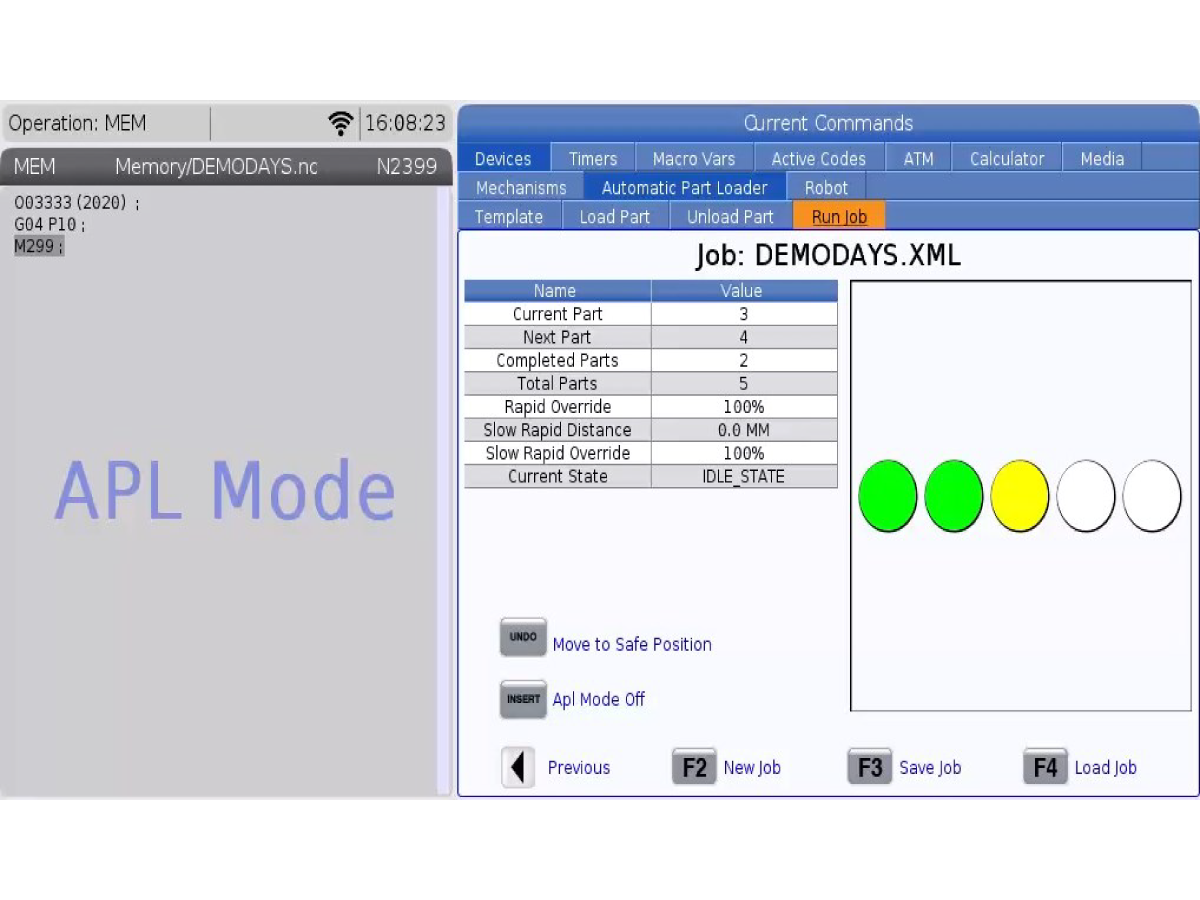
使いやすいロボットインターフェース
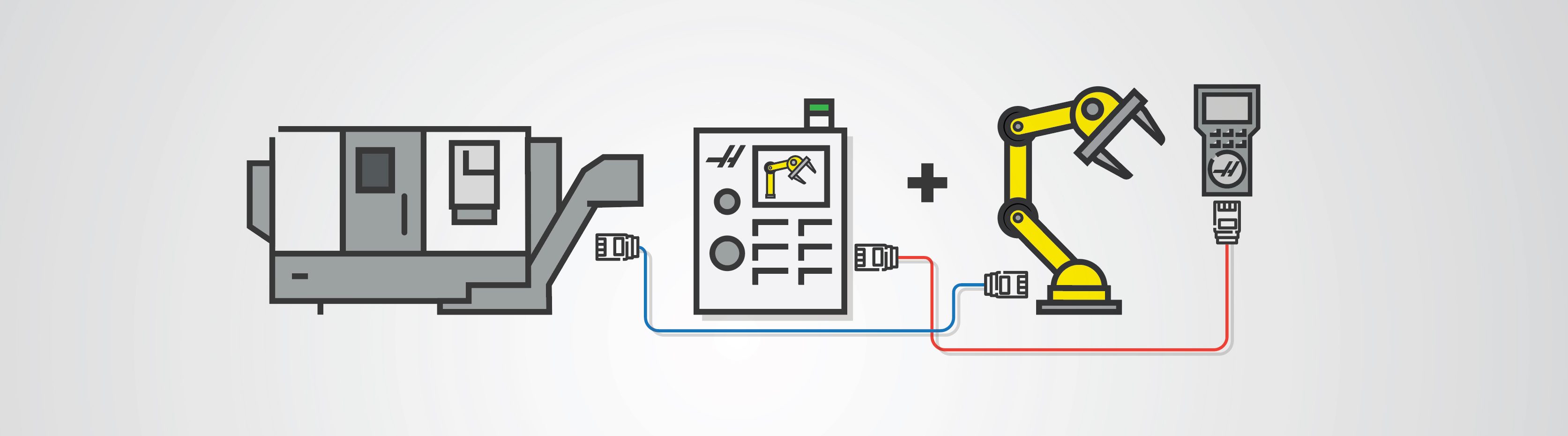
ロボットはHaasロボットインターフェースを使ってHaas制御から直接セットアップし、Haasタッチリモートジョグハンドルを使ってオペレーターがロボットの動きを素早くプログラミングするのに必要なステップをガイドします。オペレーターは、簡単な質問に答え、部品グリッパーの位置決めをし、単一のボタンを押してその位置を記録するか、基本的な数値を入力することにより、基本情報を入力します。コントロールによって自動的に動きが記録され、値が計算されるため、ロボットは自動部品積載をすぐに始めることができます。
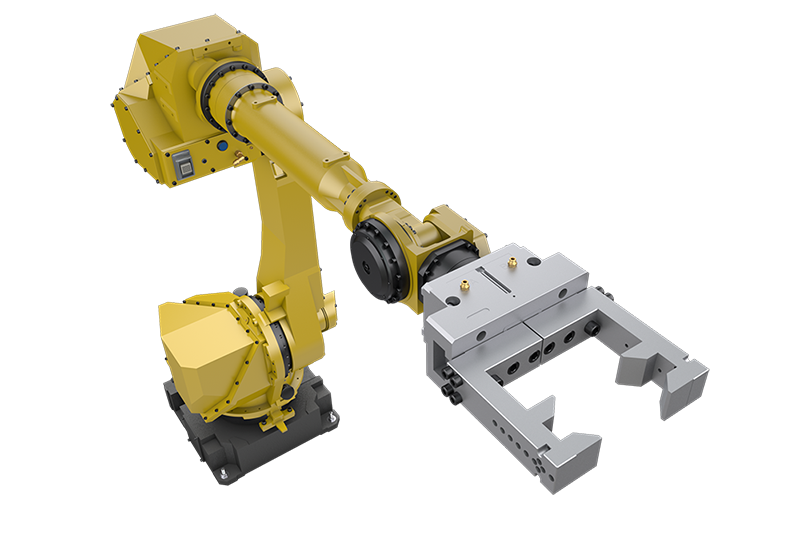
基本部品管理テーブルは、均等に間隔が設けられた行と列のグリッドパターンテンプレートをセットアップすることによって作ることができます。ロボットAPLグリッパーは、円形、六角形、正方形バーなどさまざまな部品形状向けに構成でき、部品に最適にフィットするよう調整または変更できます。
ロボットAPLは、通常の加工運転時にバックグラウンドで動作し、ストレージテーブルに部品を戻し、部品が加工されている間に新しい材料を取り出します。このようにして近連続立会いなし機械加工を実現しています。
使いやすいHaasロボットインターフェースは、オペレーターが部品のピックアップと積み下ろしの正しい位置を6軸ロボットに「教示」するための簡単なステップごとの手順を提供します。
- Haasタッチリモートジョグハンドルからロボットの動きを直接操作できるため、シームレスな統合が実現します。
- 以下を含むセットアッププロセスにおいて、ステップごとの手順とグラフィックでオペレーターを支援します。
- パーツテンプレートパターンの設定 – 行と列の数
- 部品ピックアップの始点の設定
- ロボットアームが対応位置に移動する直線経路を教えます
- ロボットがマシニング完了まで待機する対応位置を設定
- 保持具での積み下ろし位置を設定
- 最初の完成部品のドロップオフ位置を設定

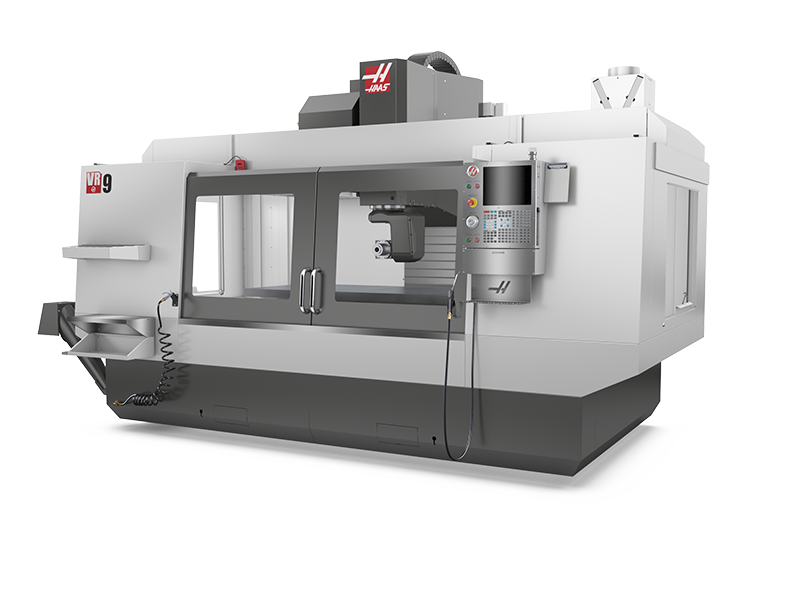
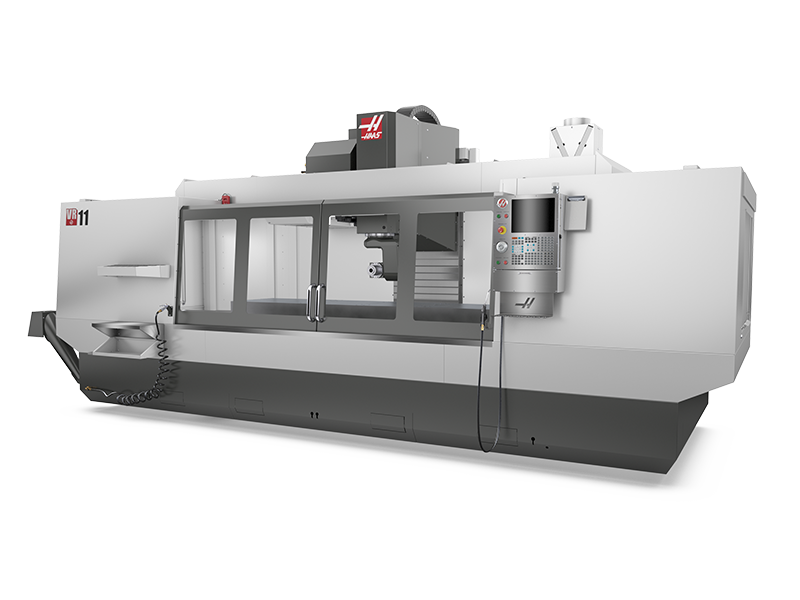
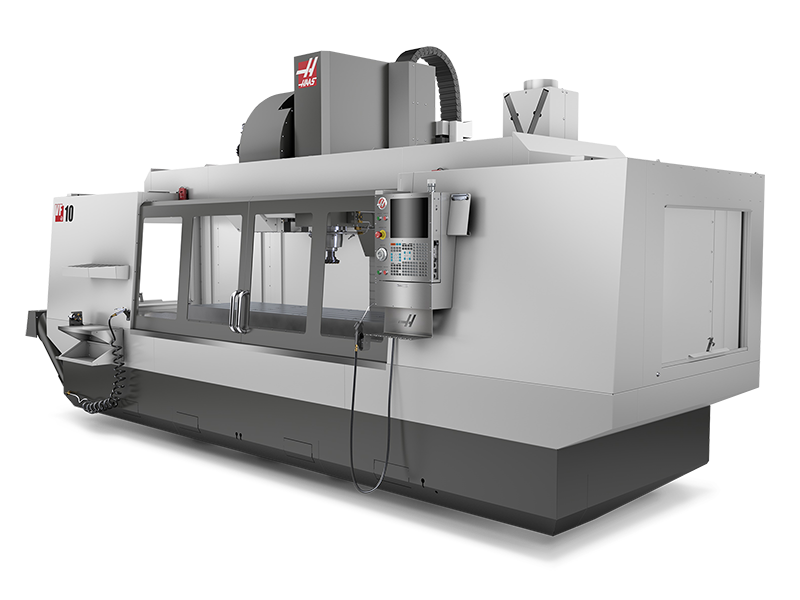
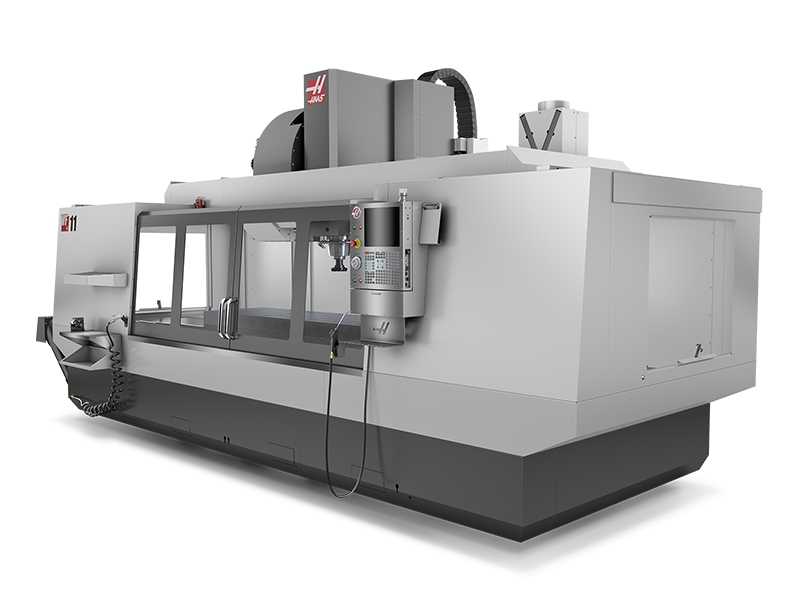
 立型マシニングセンター
立型マシニングセンター
立型マシニングセンター
立型マシニングセンター 多軸制御ソリューション
多軸制御ソリューション
多軸制御ソリューション
多軸制御ソリューション 旋盤
旋盤
旋盤
旋盤 横型マシニングセンタ
横型マシニングセンタ
横型マシニングセンタ
横型マシニングセンタ ロータリーとインデクサ
ロータリーとインデクサ
ロータリーとインデクサ
ロータリーとインデクサ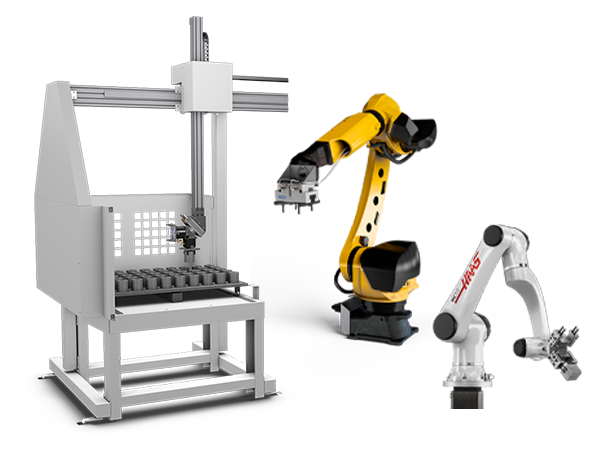 オートメーション システム
オートメーション システム
オートメーション システム
オートメーション システム デスクトップ機械
デスクトップ機械
デスクトップ機械
デスクトップ機械
























 {{ } }}
{{ } }}