-
maskiner
-
Lodrette fræsere
Lodrette fræsere
-
Multi-aksede løsninger
Multi-aksede løsninger
-
Drejebænke
Drejebænke
-
Horisontale fræsere
Horisontale fræsere
-
Rundborde og indekser
Rundborde og indekser
-
Automationssystemer
Automationssystemer
-
Bordmaskiner
Bordmaskiner
-
Køb udstyr
Køb udstyr
-
Fabrikationsmaskiner
Fabrikationsmaskiner
KØB AF VÆRKTØJERVIL DU TALE MED NOGEN?Et Haas Factory Outlet (HFO) kan besvare dine spørgsmål og guide dig gennem de bedste valgmuligheder for dig.
CONTACT YOUR DISTRIBUTOR > -
Lodrette fræsere
-
Ekstraudstyr
-
/2026-04-VOP-SquareComponent.jpg/_jcr_content/renditions/cq5dam.thumbnail.319.319.png) Værdipakker
Værdipakker
Værdipakker
Værdipakker -
 Spindler
Spindler
Spindler
Spindler -
 Værktøjsvekslere
Værktøjsvekslere
Værktøjsvekslere
Værktøjsvekslere -
 4.- | 5.-akse
4.- | 5.-akse
4.- | 5.-akse
4.- | 5.-akse -
 Revolverhoveder og roterende værktøj
Revolverhoveder og roterende værktøj
Revolverhoveder og roterende værktøj
Revolverhoveder og roterende værktøj -
 Probing
Probing
Probing
Probing -
 Spån- og kølemiddelhåndtering
Spån- og kølemiddelhåndtering
Spån- og kølemiddelhåndtering
Spån- og kølemiddelhåndtering -
 Haas-styring
Haas-styring
Haas-styring
Haas-styring -
 Produktvalg
Produktvalg
Produktvalg
Produktvalg -
 Værktøjsbearbejdning og fastgørelse
Værktøjsbearbejdning og fastgørelse
Værktøjsbearbejdning og fastgørelse
Værktøjsbearbejdning og fastgørelse -
 Emneholder
Emneholder
Emneholder
Emneholder -
 5-akse-løsninger
5-akse-løsninger
5-akse-løsninger
5-akse-løsninger -
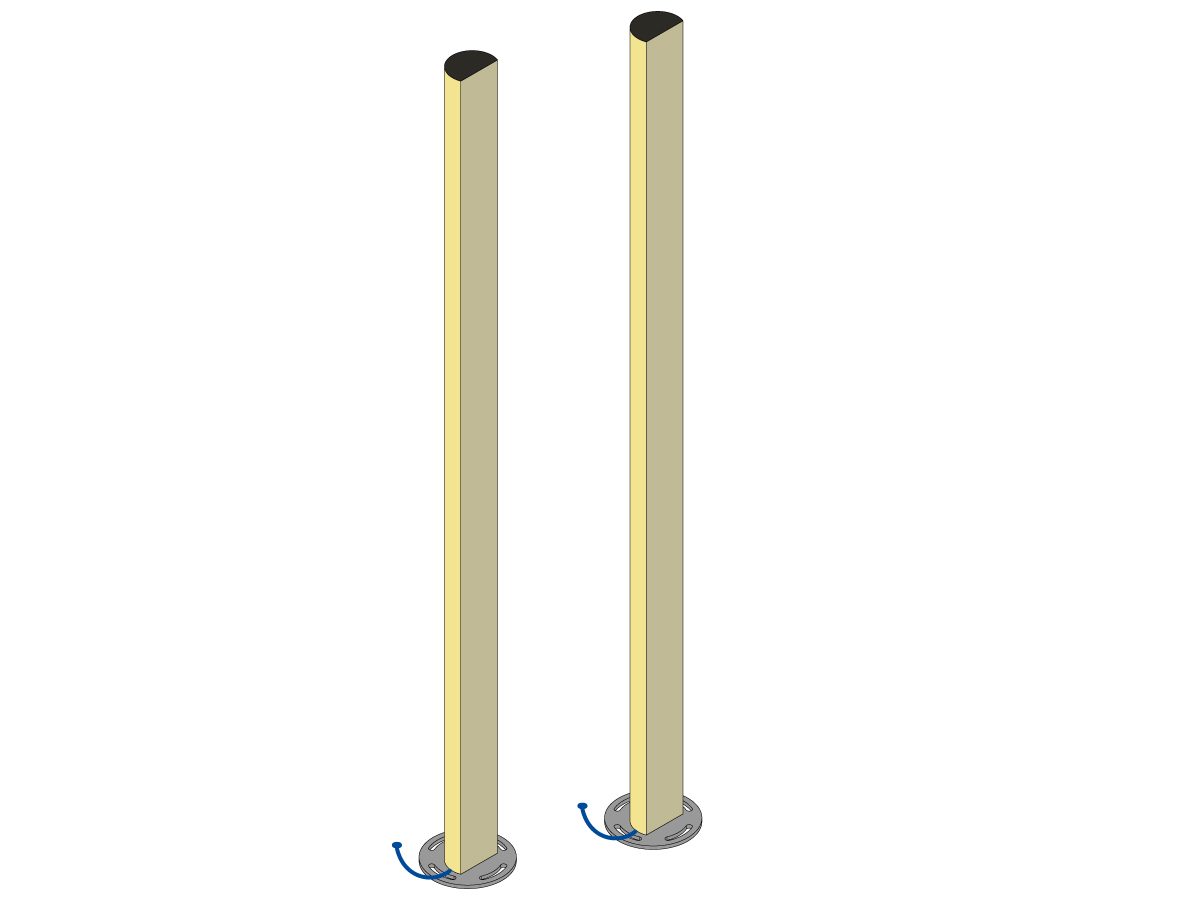
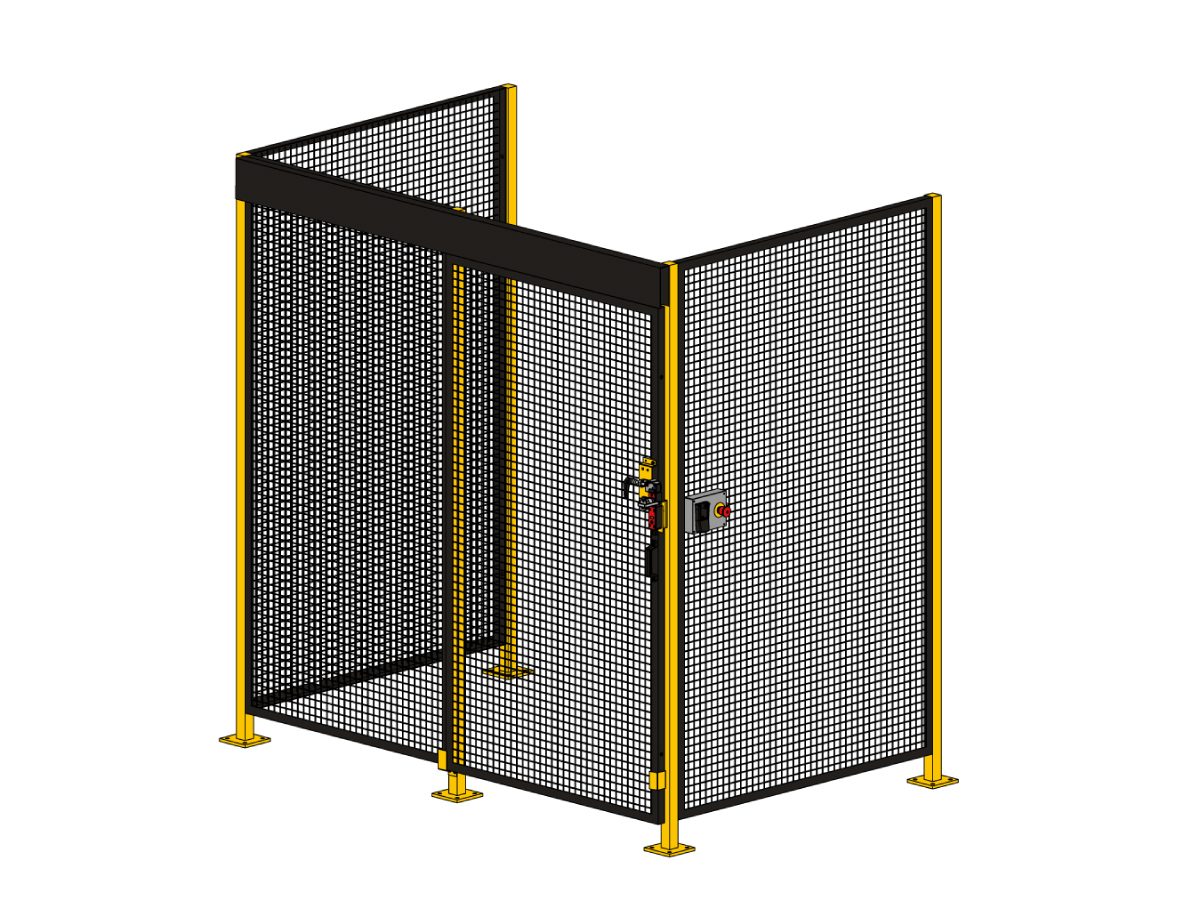
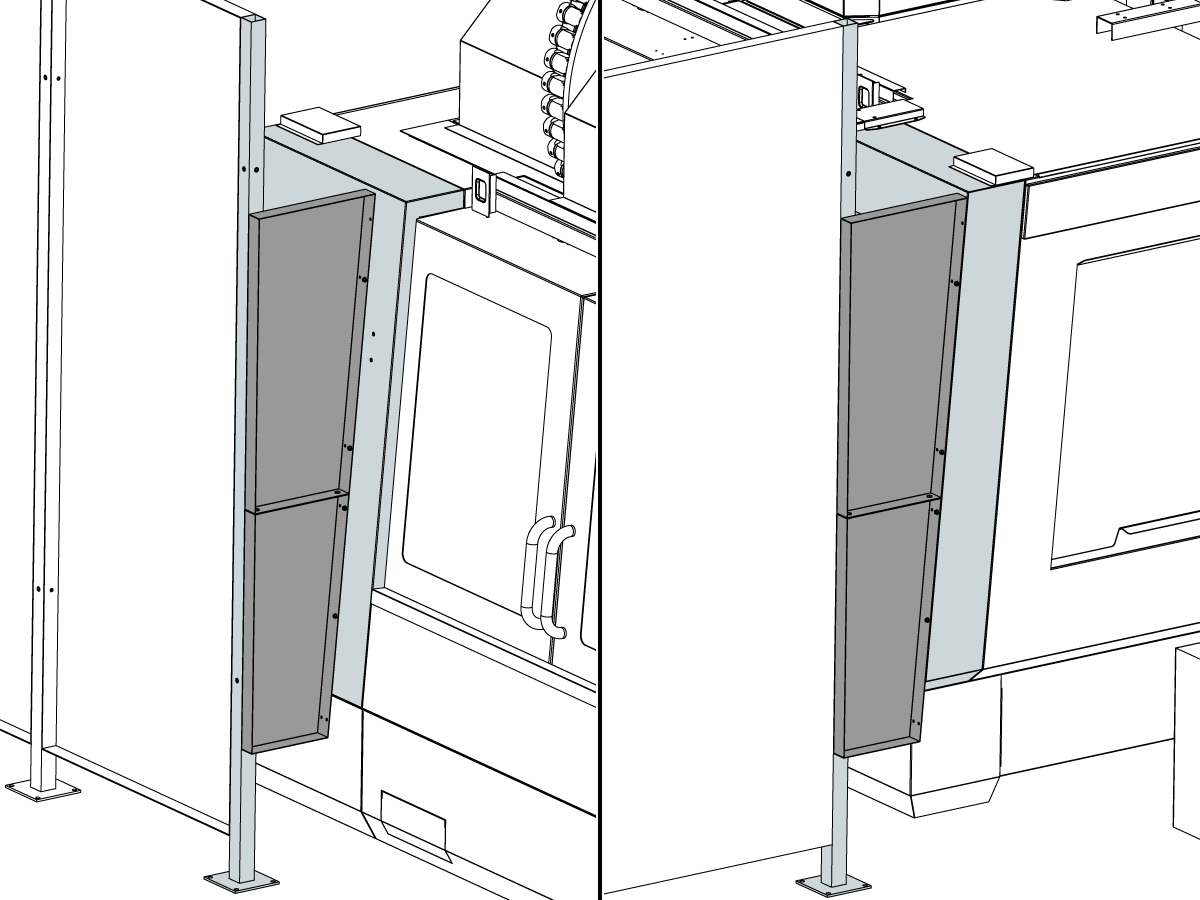
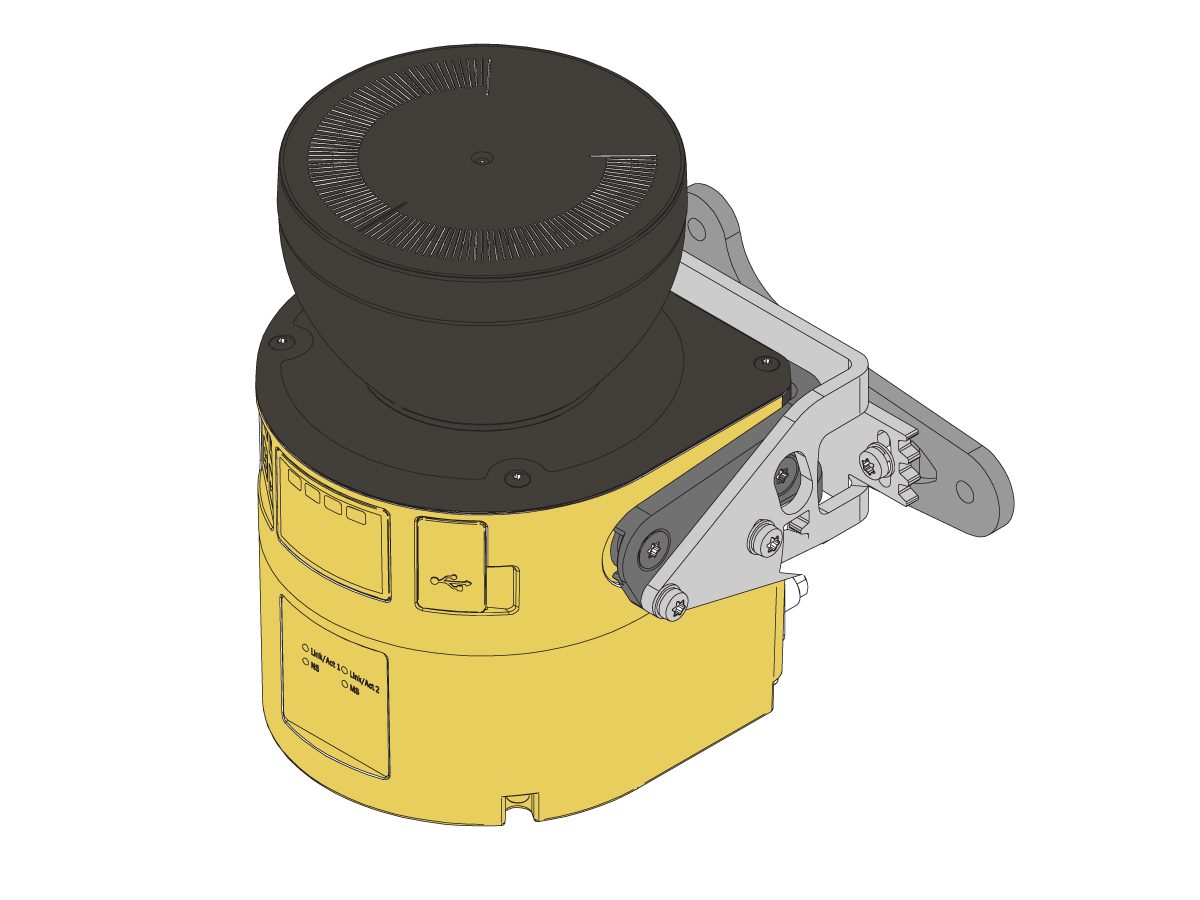
 Automatisering
Automatisering
Automatisering
Automatisering
KØB AF VÆRKTØJERVIL DU TALE MED NOGEN?Et Haas Factory Outlet (HFO) kan besvare dine spørgsmål og guide dig gennem de bedste valgmuligheder for dig.
CONTACT YOUR DISTRIBUTOR > -
-
Why Haas
Opdag Haas-forskellen
-
Tjeneste
- Videoer













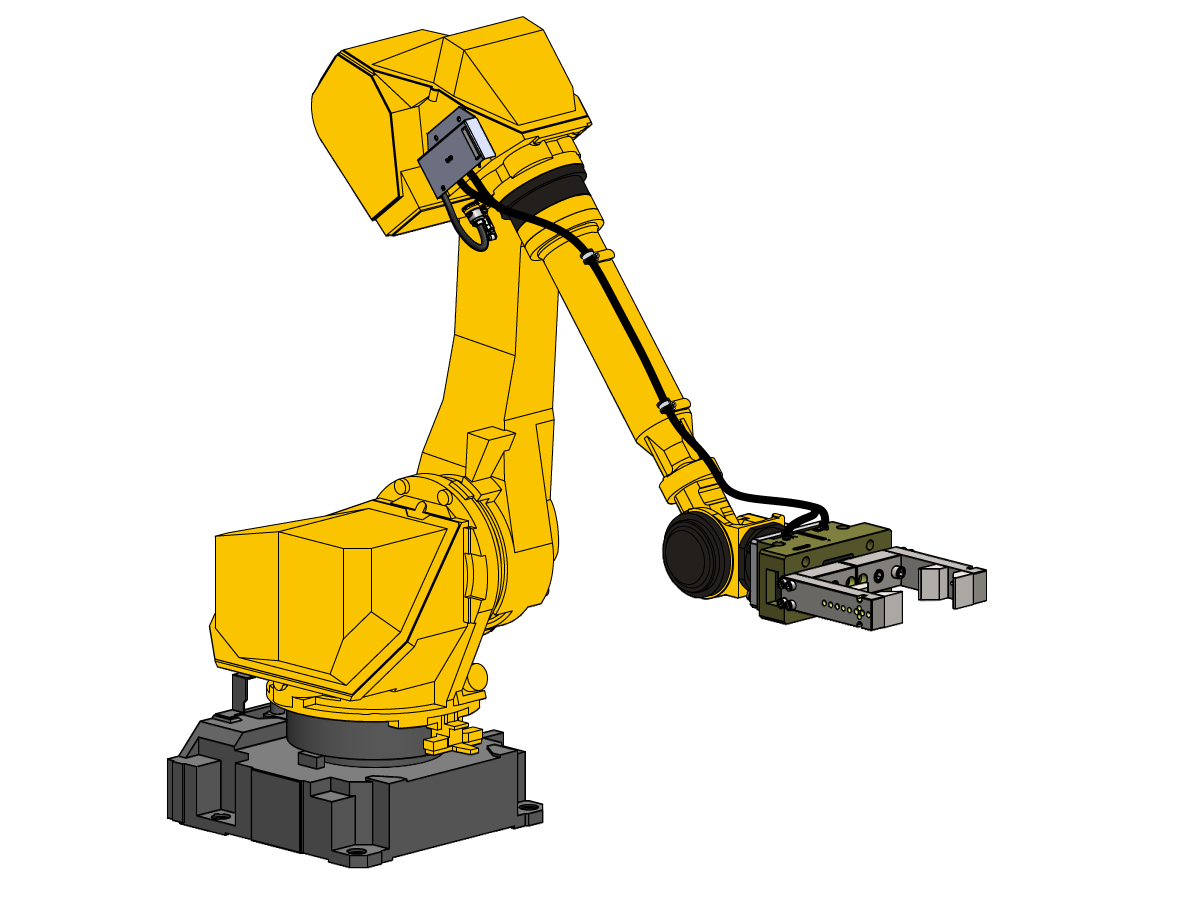
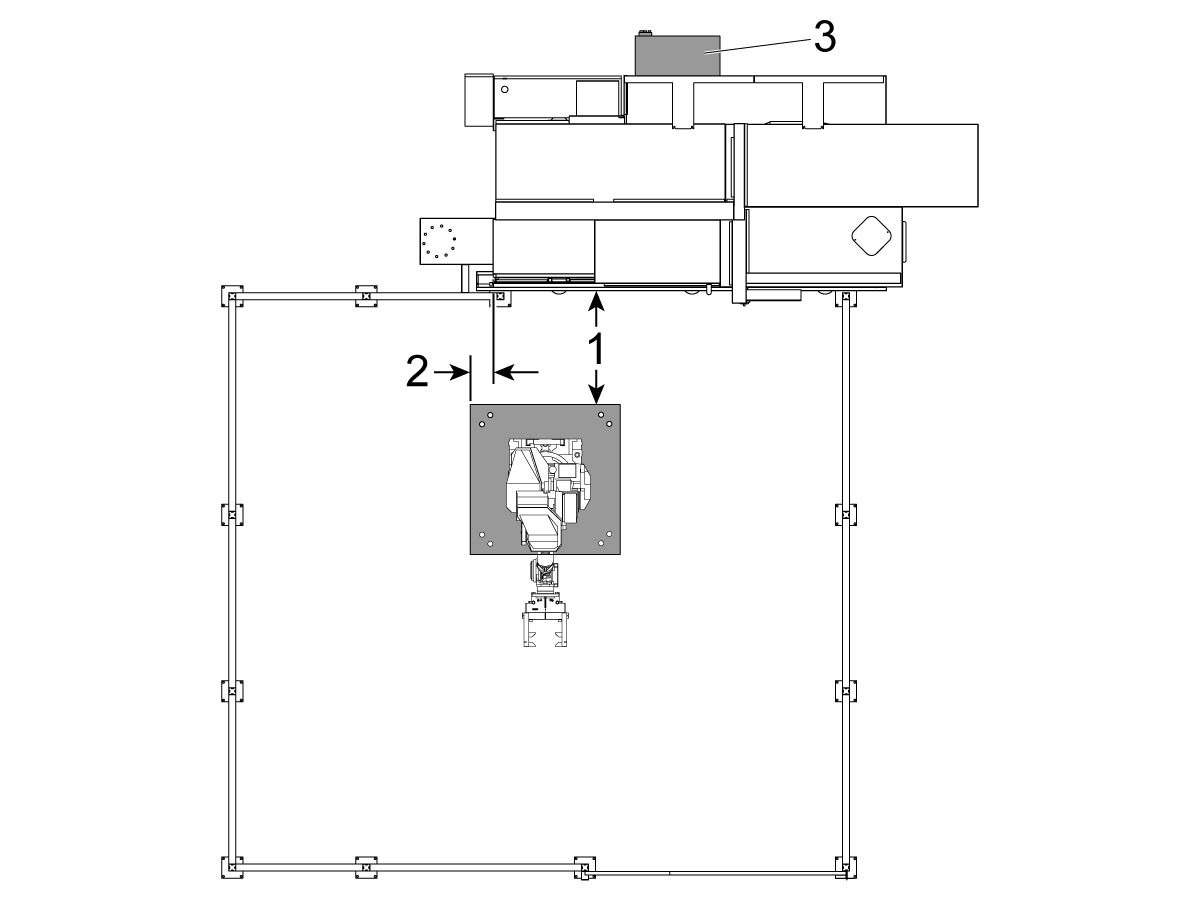
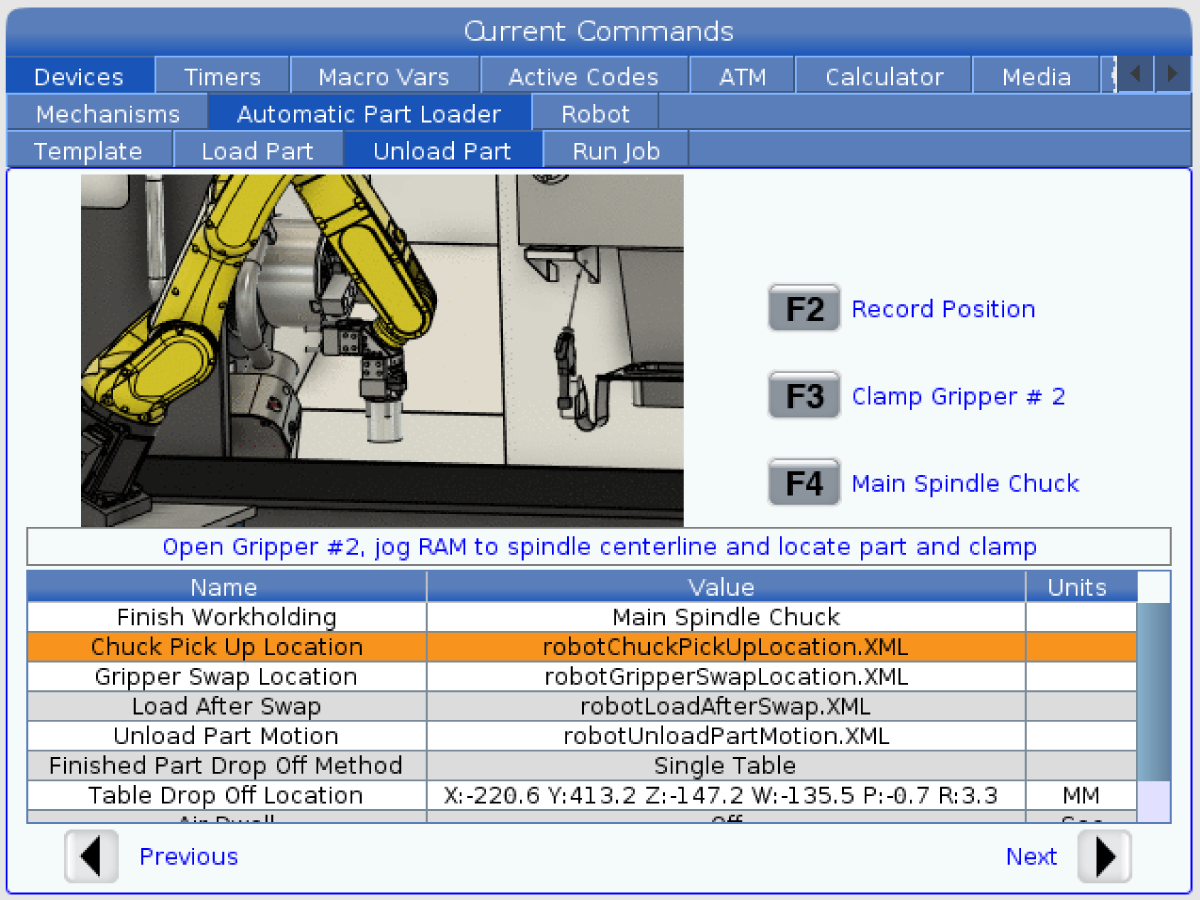
-setup/dcs_robot_arm_dsc_zones.png)

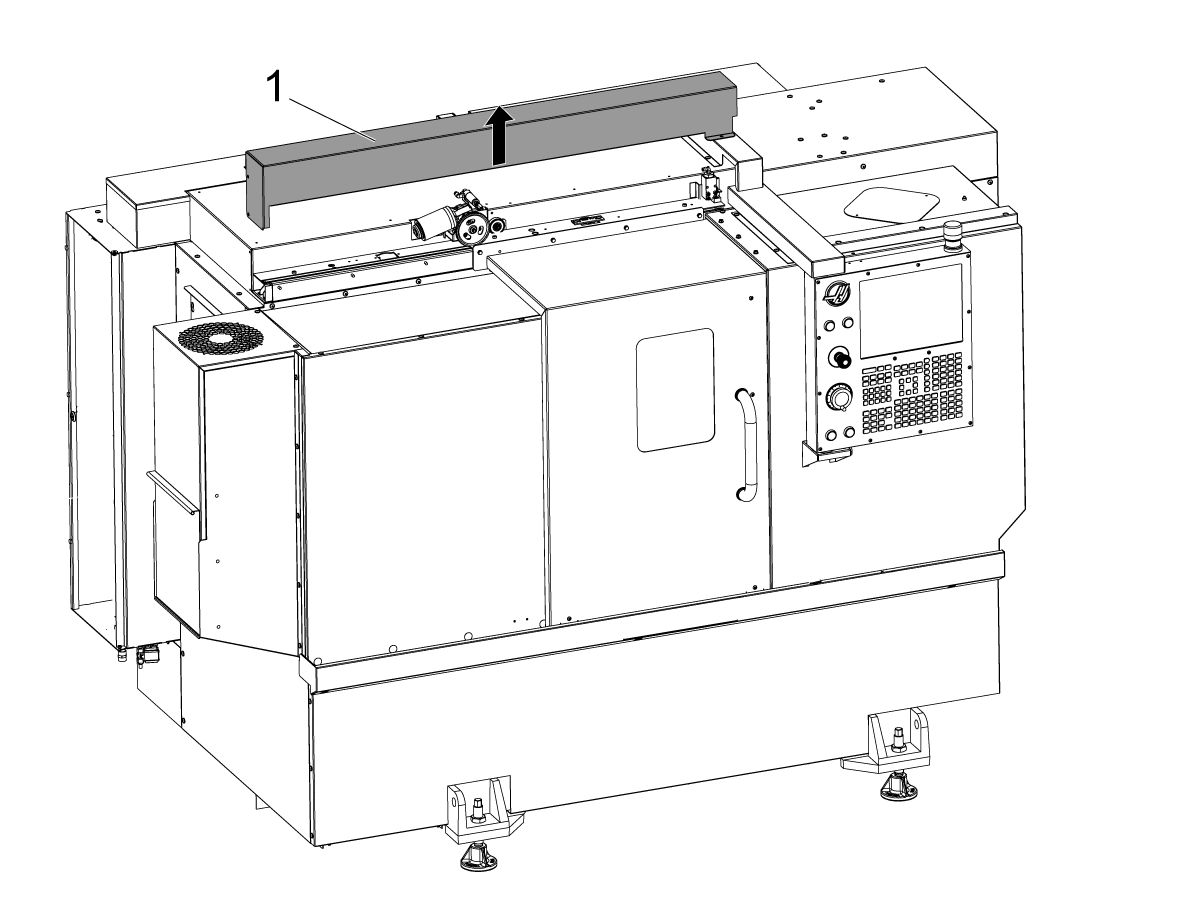
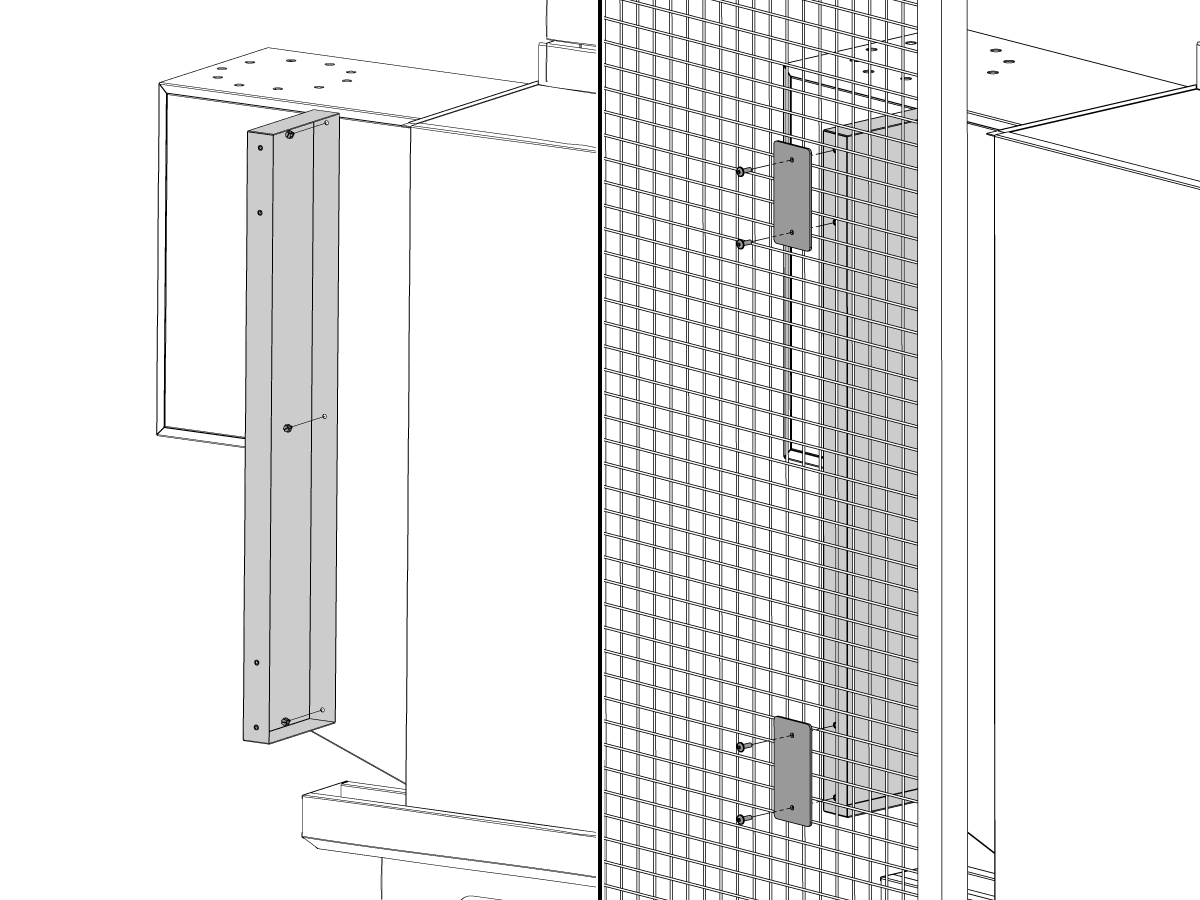
---vertical---installation/2019-10-08_15h56_48.jpg)