-
maskiner
-
Vertikale freser
Vertikale freser
-
Flereakseløsninger
Flereakseløsninger
-
Dreiebenker
Dreiebenker
-
Horisontale freser
Horisontale freser
-
Roterende enheter og indekseringsenheter
Roterende enheter og indekseringsenheter
-
Automasjonssystemer
Automasjonssystemer
-
Stasjonære maskiner
Stasjonære maskiner
-
Butikkutstyr
Butikkutstyr
-
Fabrikeringsmaskiner
Fabrikeringsmaskiner
VIL DU SNAKKE MED NOEN?Et Haas fabrikkutsalg (HFO) kan svare på spørsmålene dine, og ta deg gjennom de beste alternativene dine.
CONTACT YOUR DISTRIBUTOR > -
Vertikale freser
-
Alternativer
-
/2026-04-VOP-SquareComponent.jpg/_jcr_content/renditions/cq5dam.thumbnail.319.319.png) Value Option-pakker
Value Option-pakker
Value Option-pakker
Value Option-pakker -
 Spindler
Spindler
Spindler
Spindler -
 Verktøyvekslere
Verktøyvekslere
Verktøyvekslere
Verktøyvekslere -
 4.- | 5. akse
4.- | 5. akse
4.- | 5. akse
4.- | 5. akse -
 Revolverhoder og direkteverktøy
Revolverhoder og direkteverktøy
Revolverhoder og direkteverktøy
Revolverhoder og direkteverktøy -
 Probing
Probing
Probing
Probing -
 Håndtering av spon og kjølevæske
Håndtering av spon og kjølevæske
Håndtering av spon og kjølevæske
Håndtering av spon og kjølevæske -
 Haas-kontrollen
Haas-kontrollen
Haas-kontrollen
Haas-kontrollen -
 Produktalternativer
Produktalternativer
Produktalternativer
Produktalternativer -
 Verktøy og oppspenning
Verktøy og oppspenning
Verktøy og oppspenning
Verktøy og oppspenning -
 Arbeidsoppspenning
Arbeidsoppspenning
Arbeidsoppspenning
Arbeidsoppspenning -
 Løsninger med 5-akse
Løsninger med 5-akse
Løsninger med 5-akse
Løsninger med 5-akse -
 Automatisering
Automatisering
Automatisering
Automatisering
VIL DU SNAKKE MED NOEN?Et Haas fabrikkutsalg (HFO) kan svare på spørsmålene dine, og ta deg gjennom de beste alternativene dine.
CONTACT YOUR DISTRIBUTOR > -
-
Why Haas
Oppdag forskjellen Haas gjør
-
Service
Velkommen til Haas Service
- Videoer









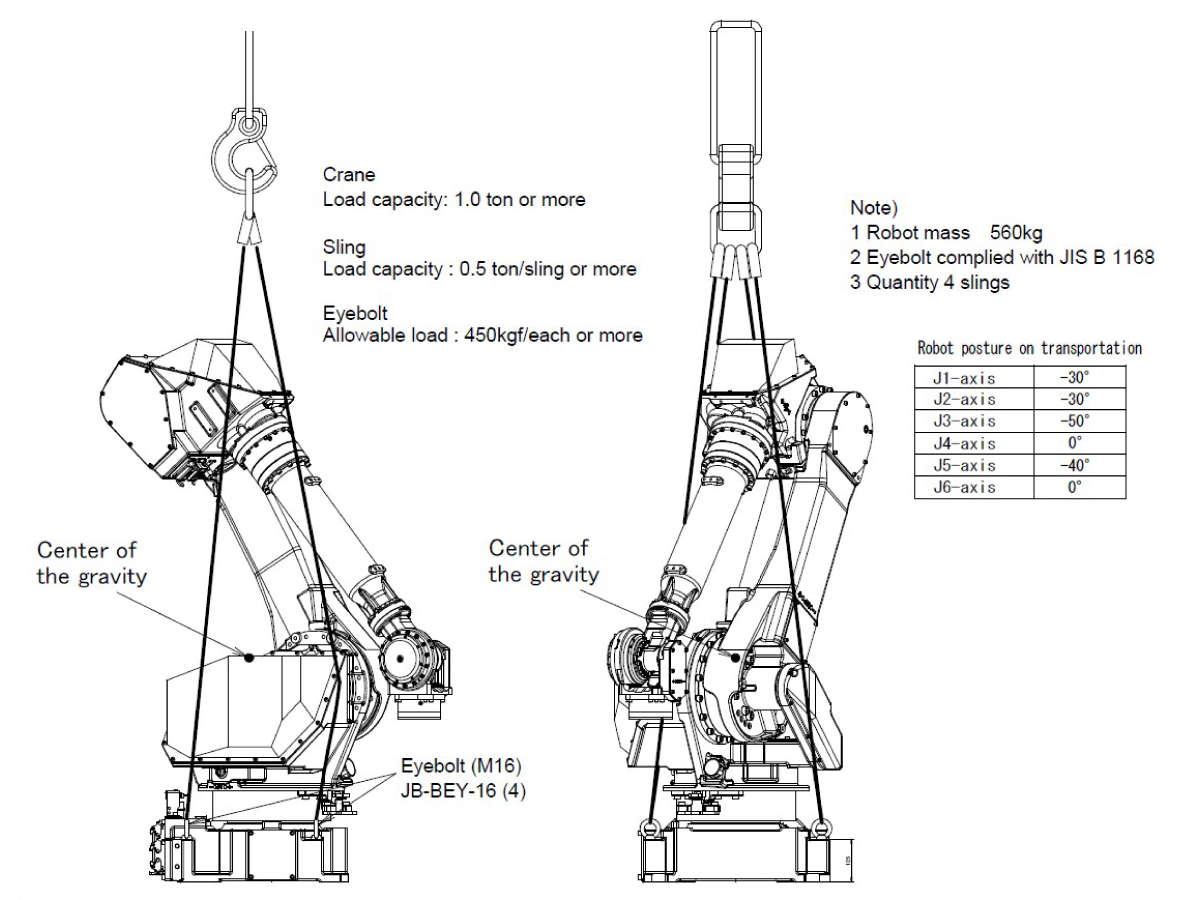

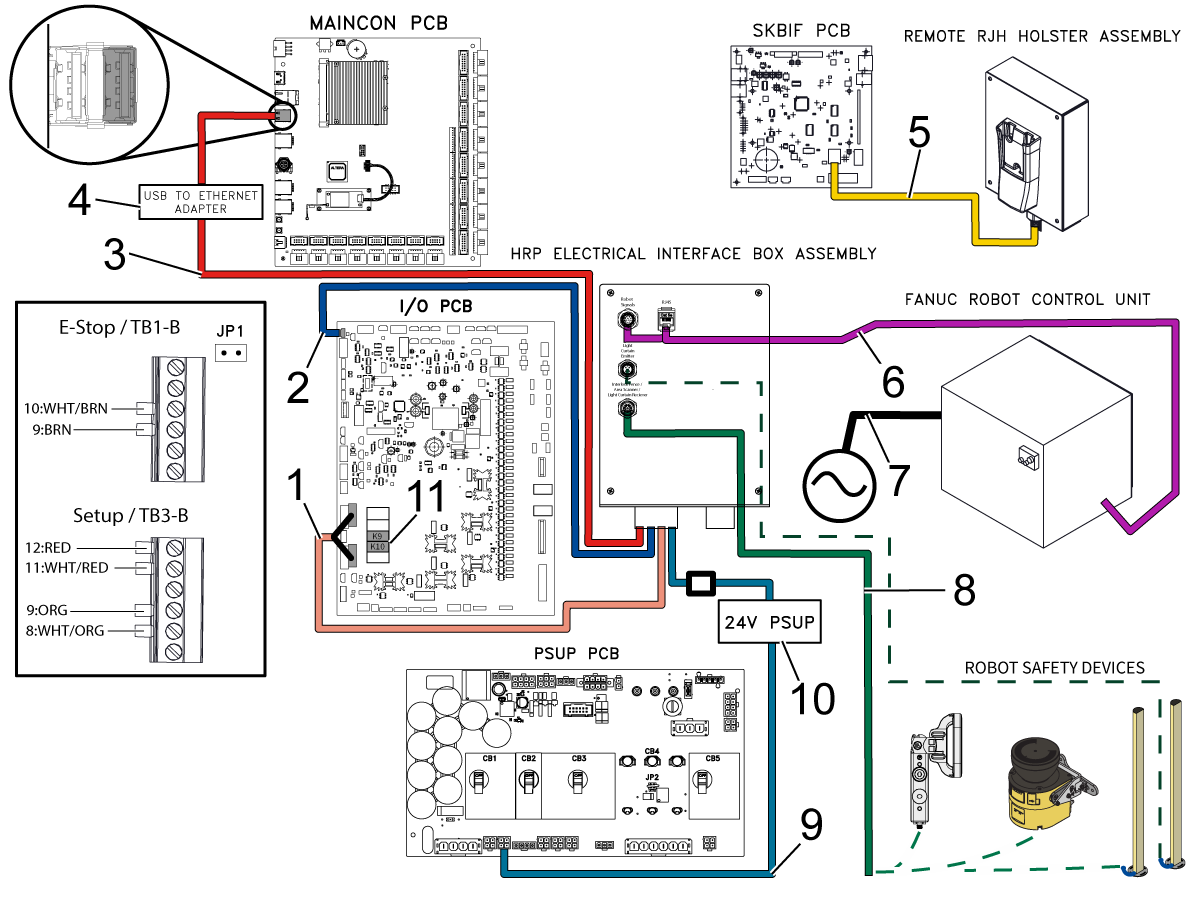
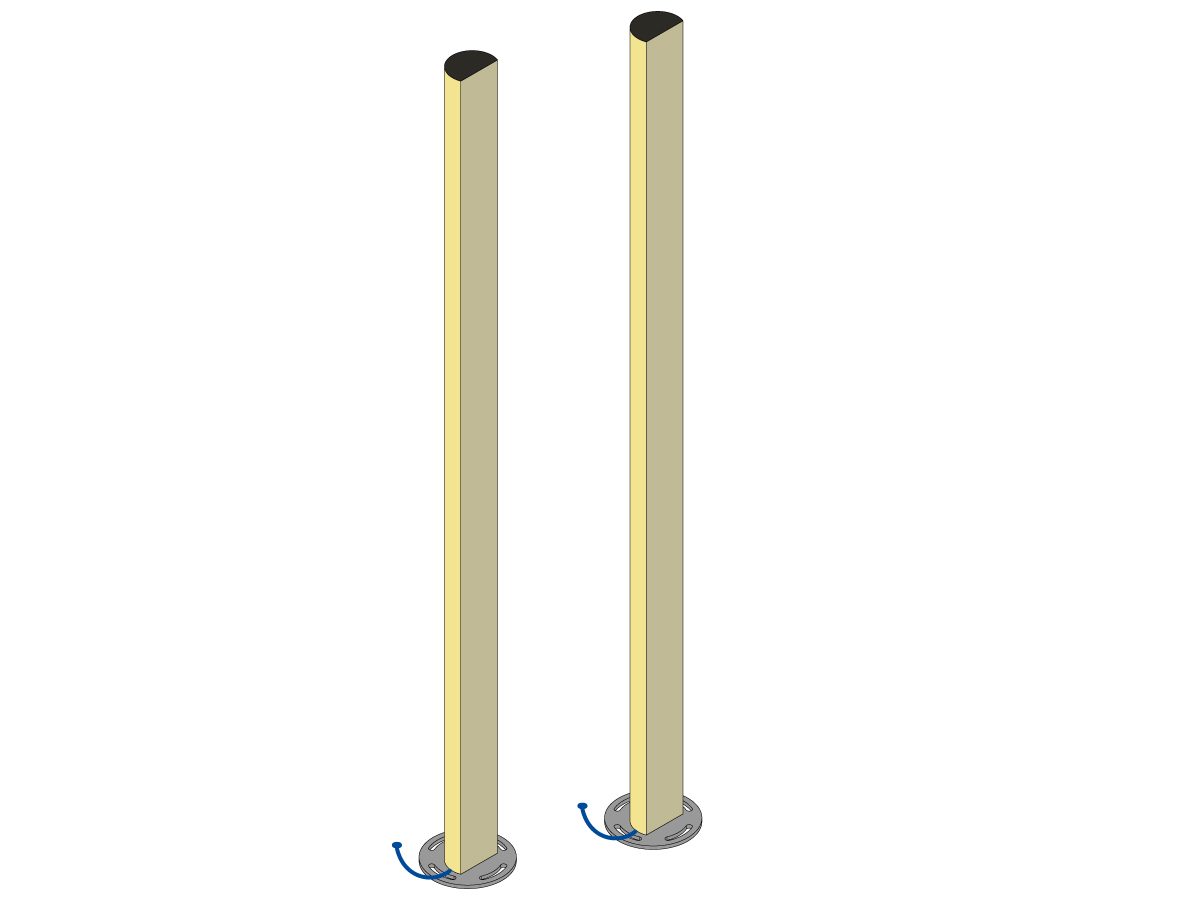
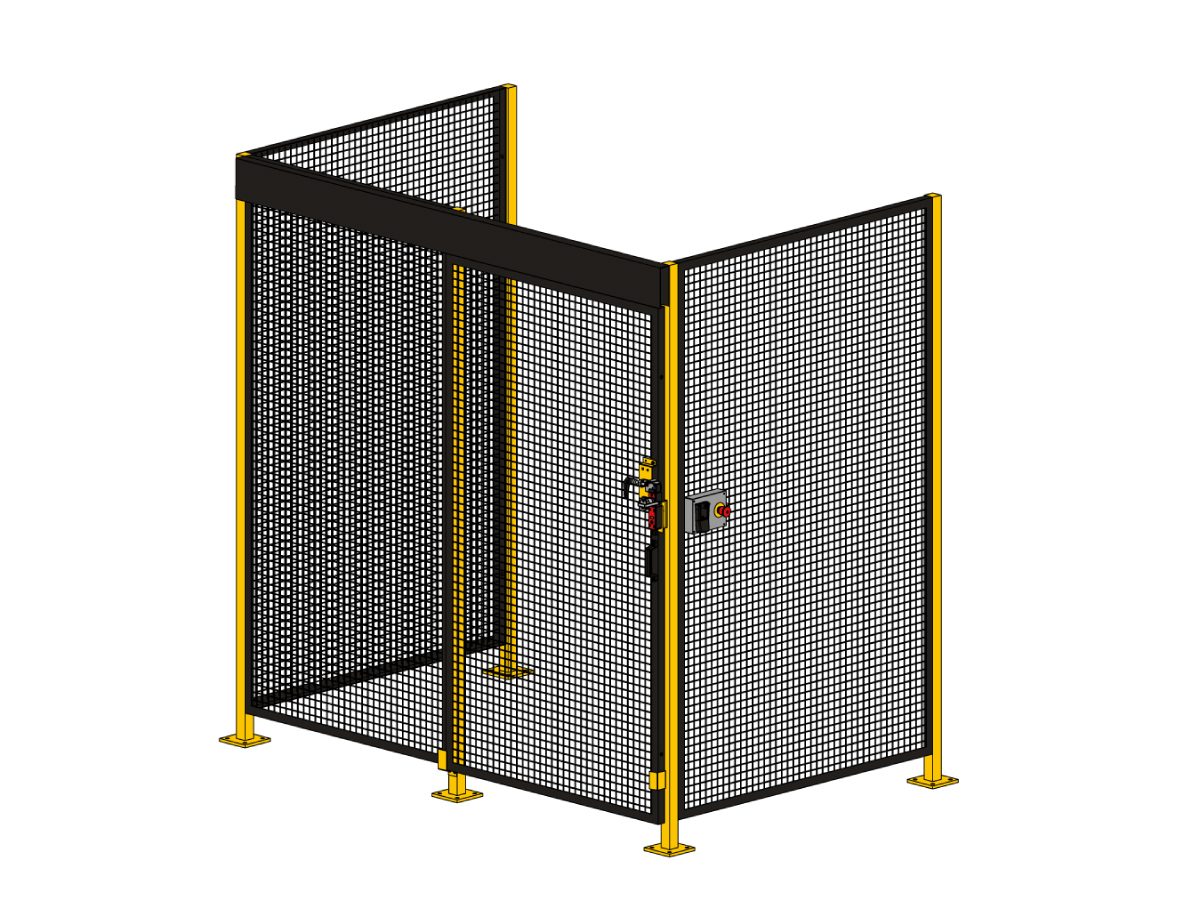
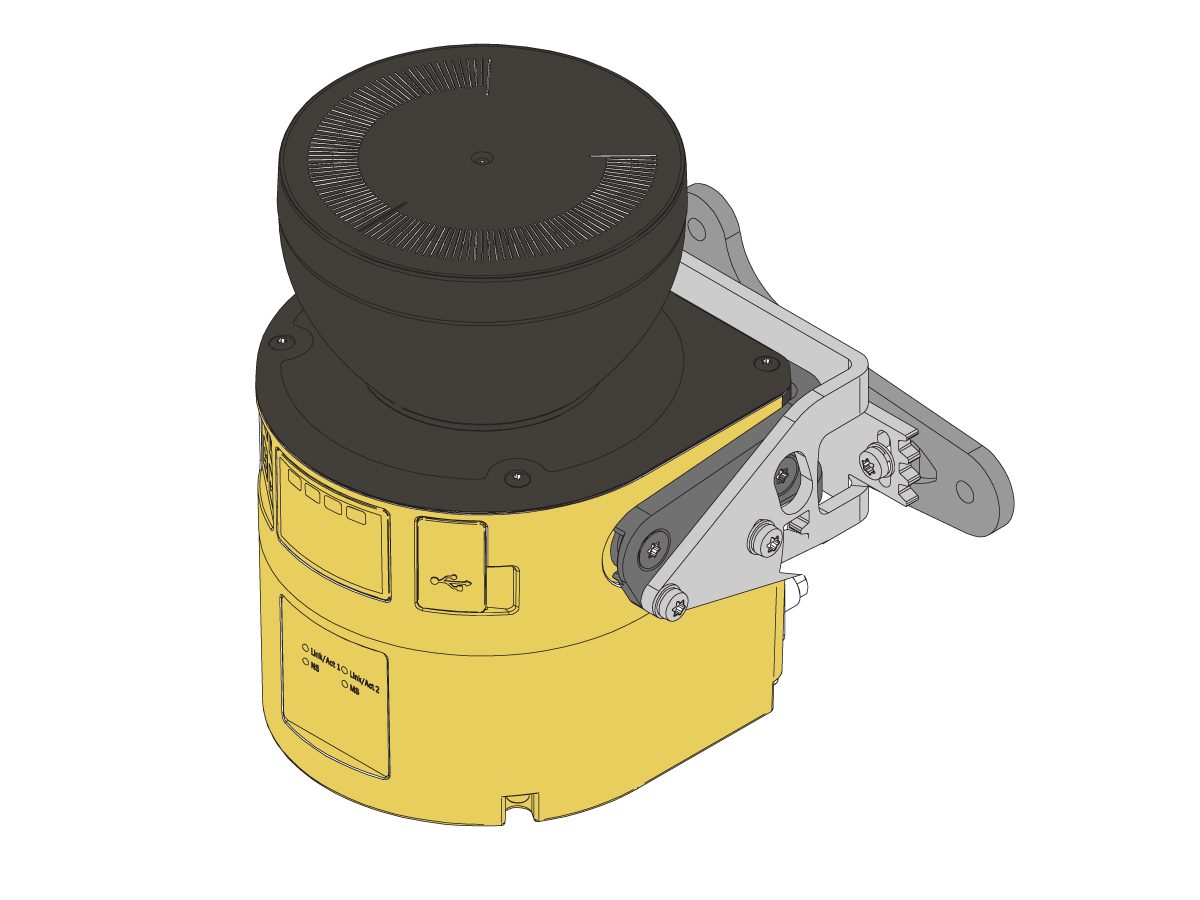



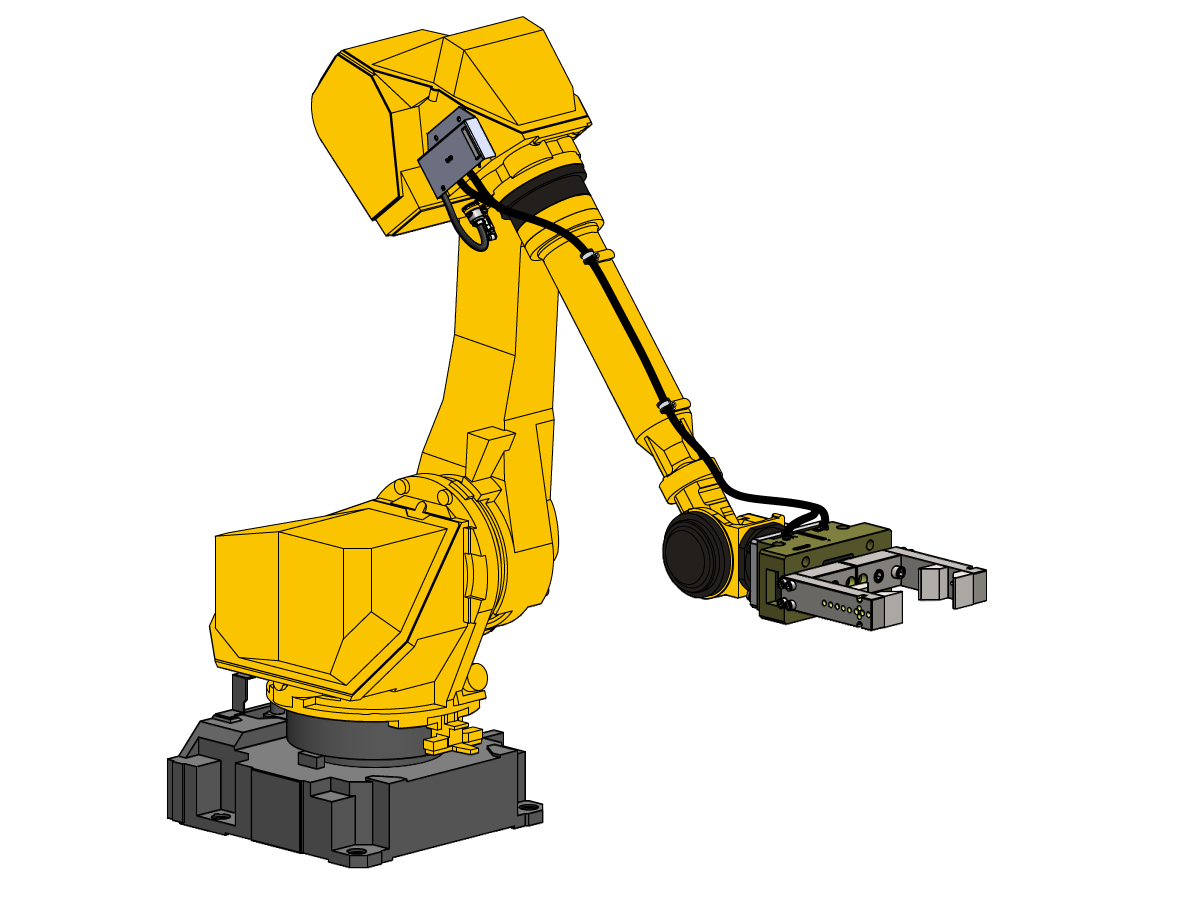
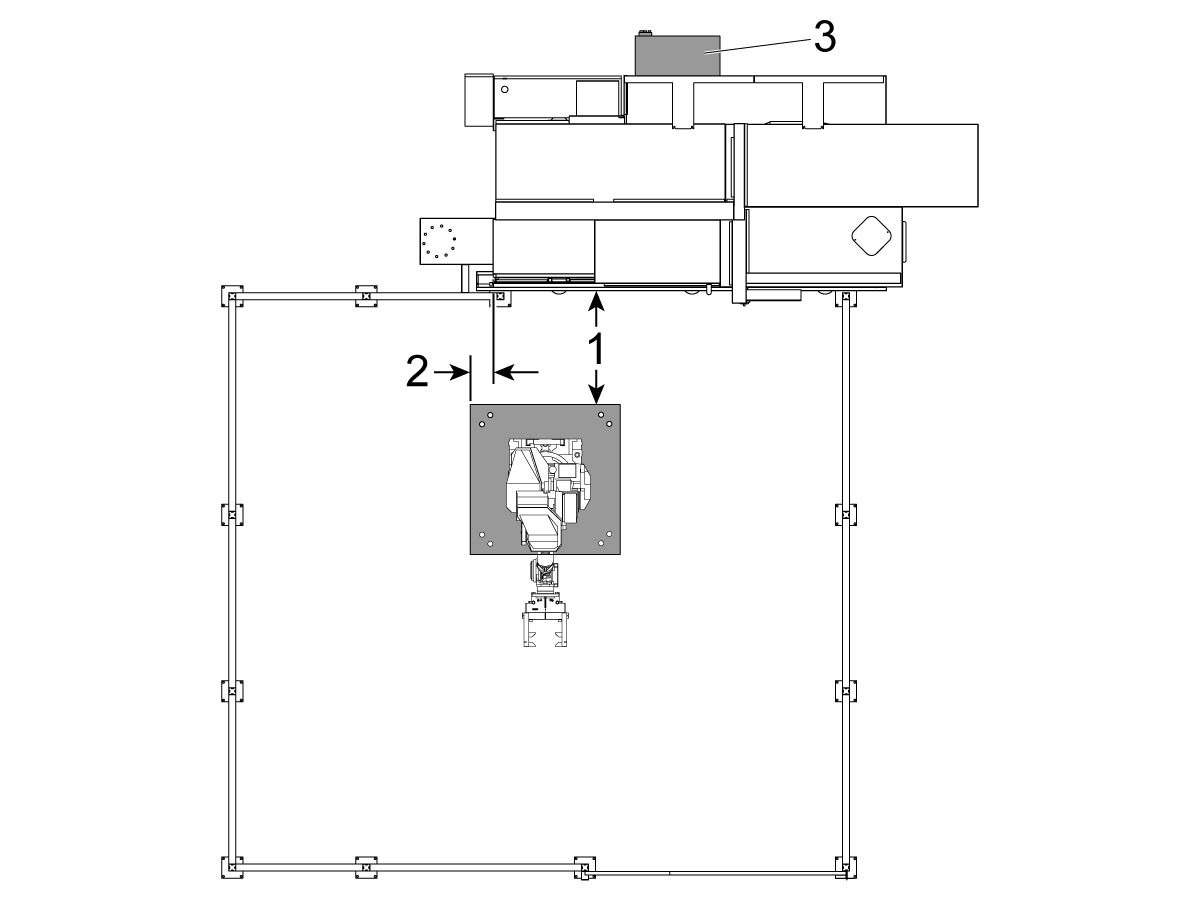
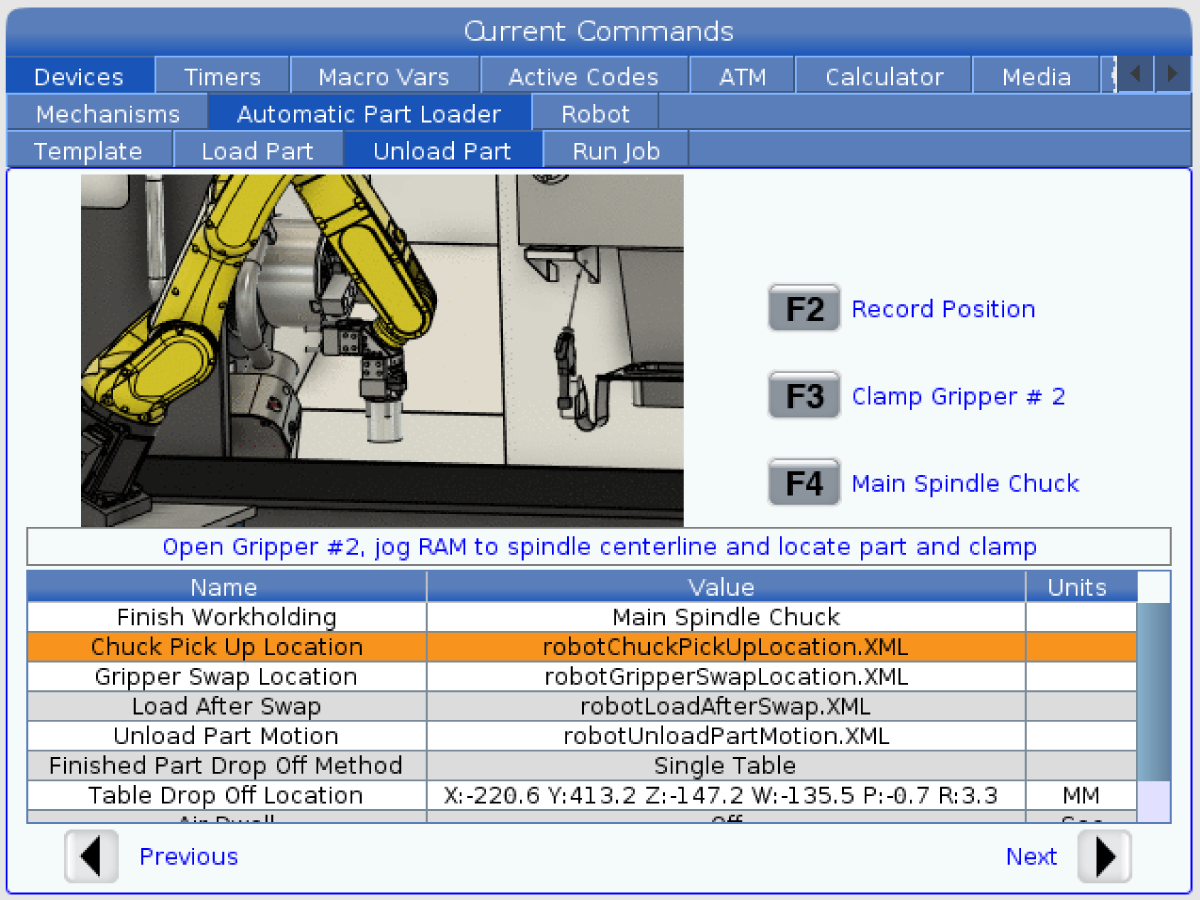
-setup/dcs_robot_arm_dsc_zones.png)

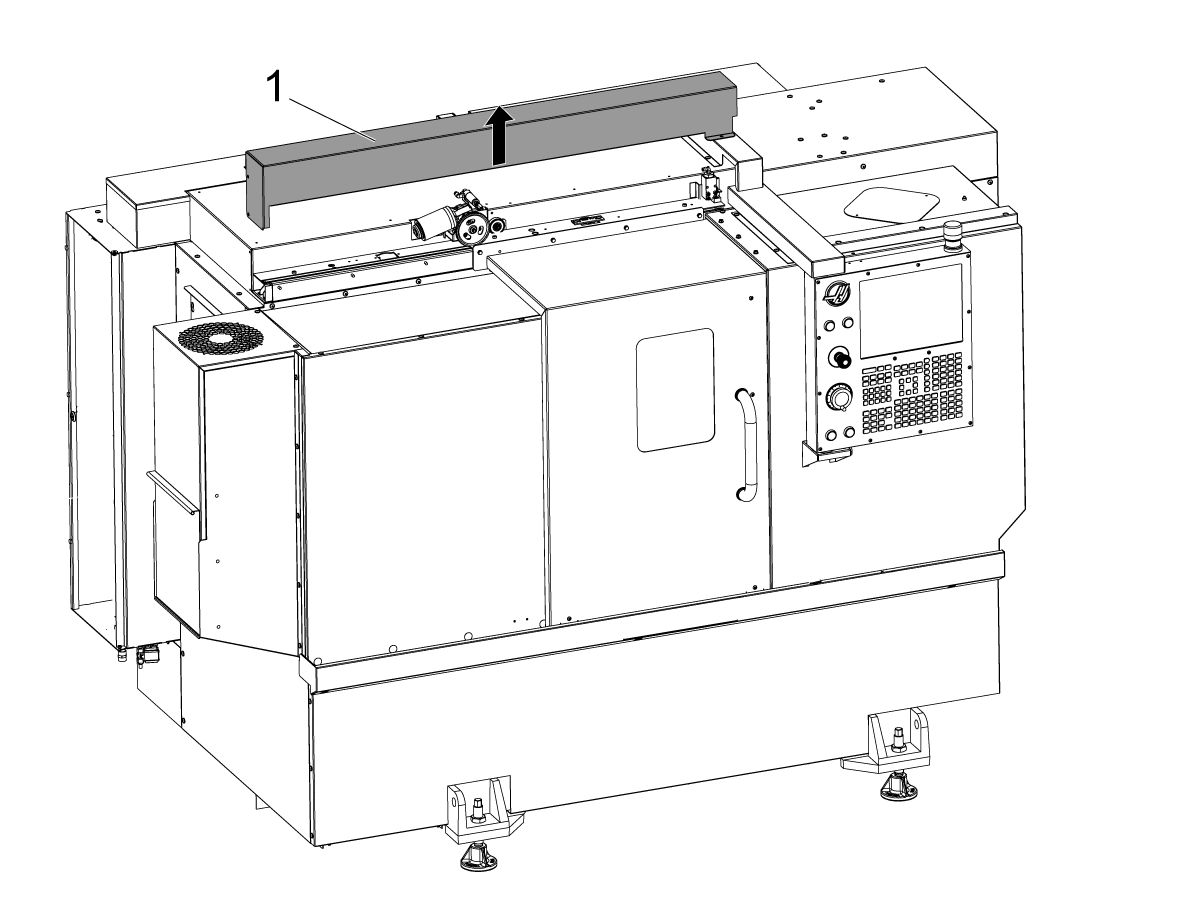
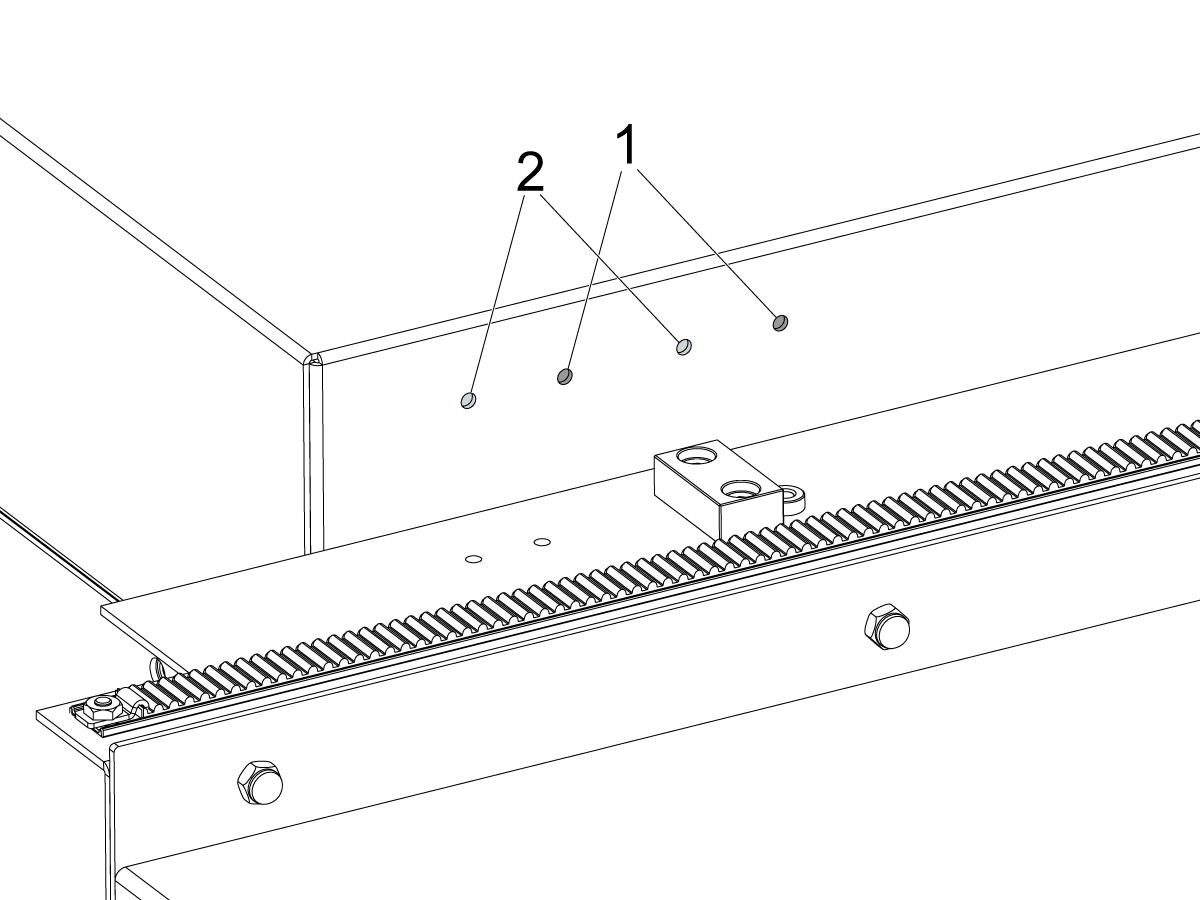
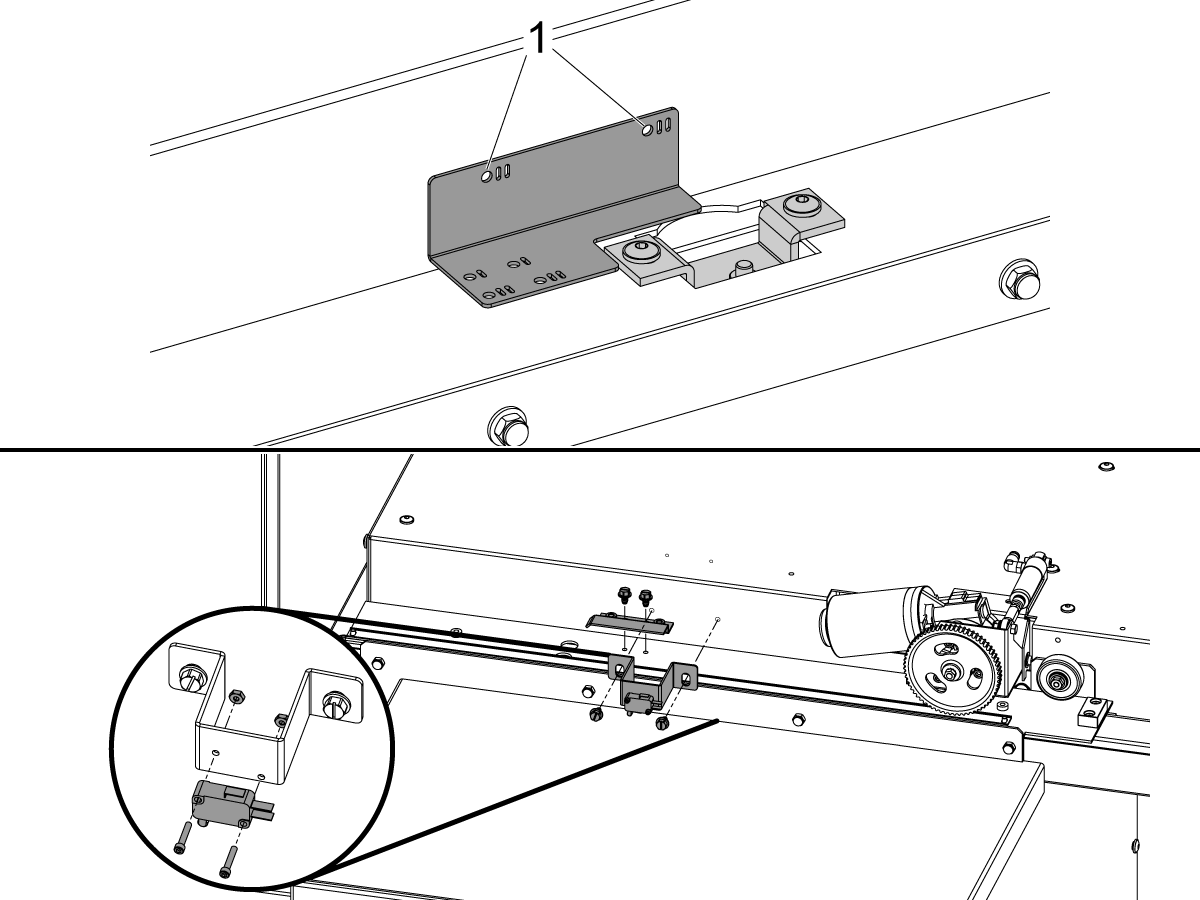
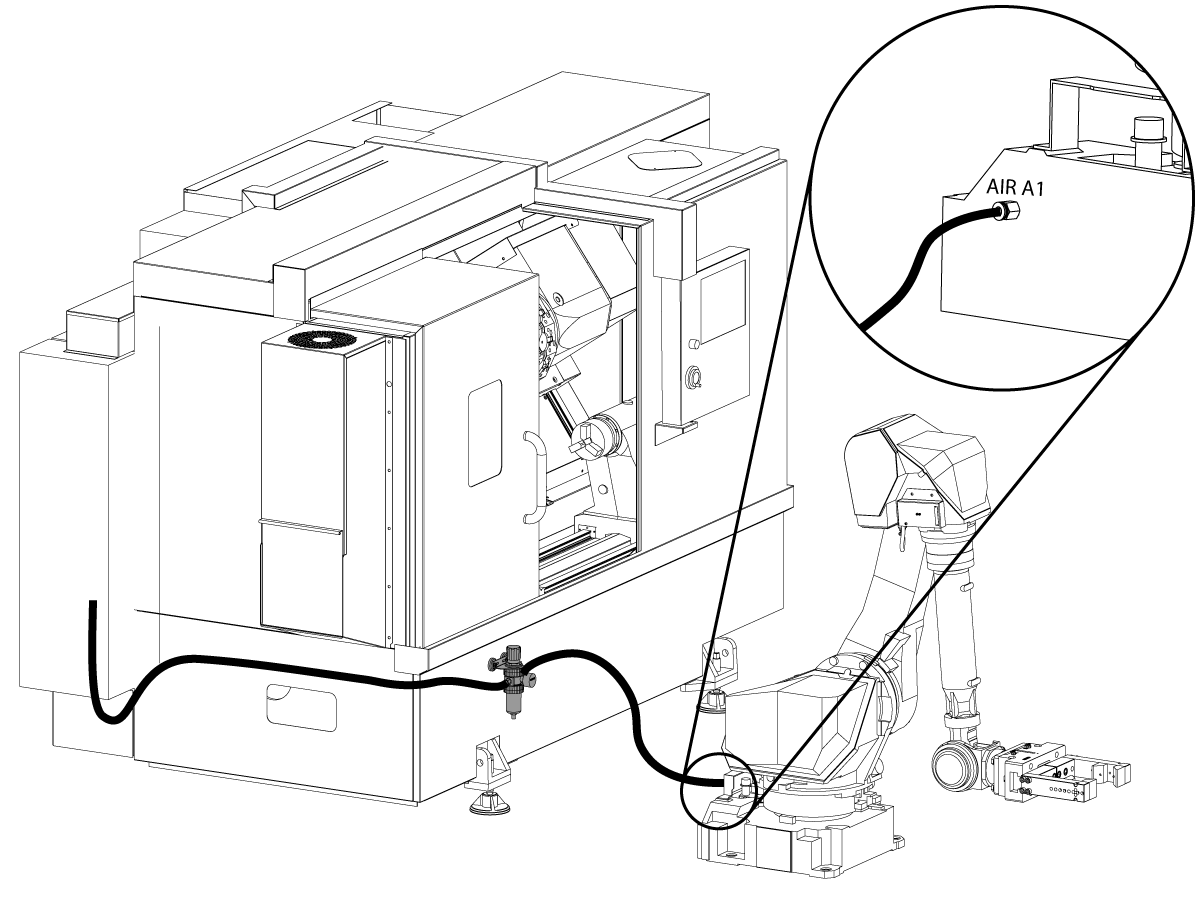
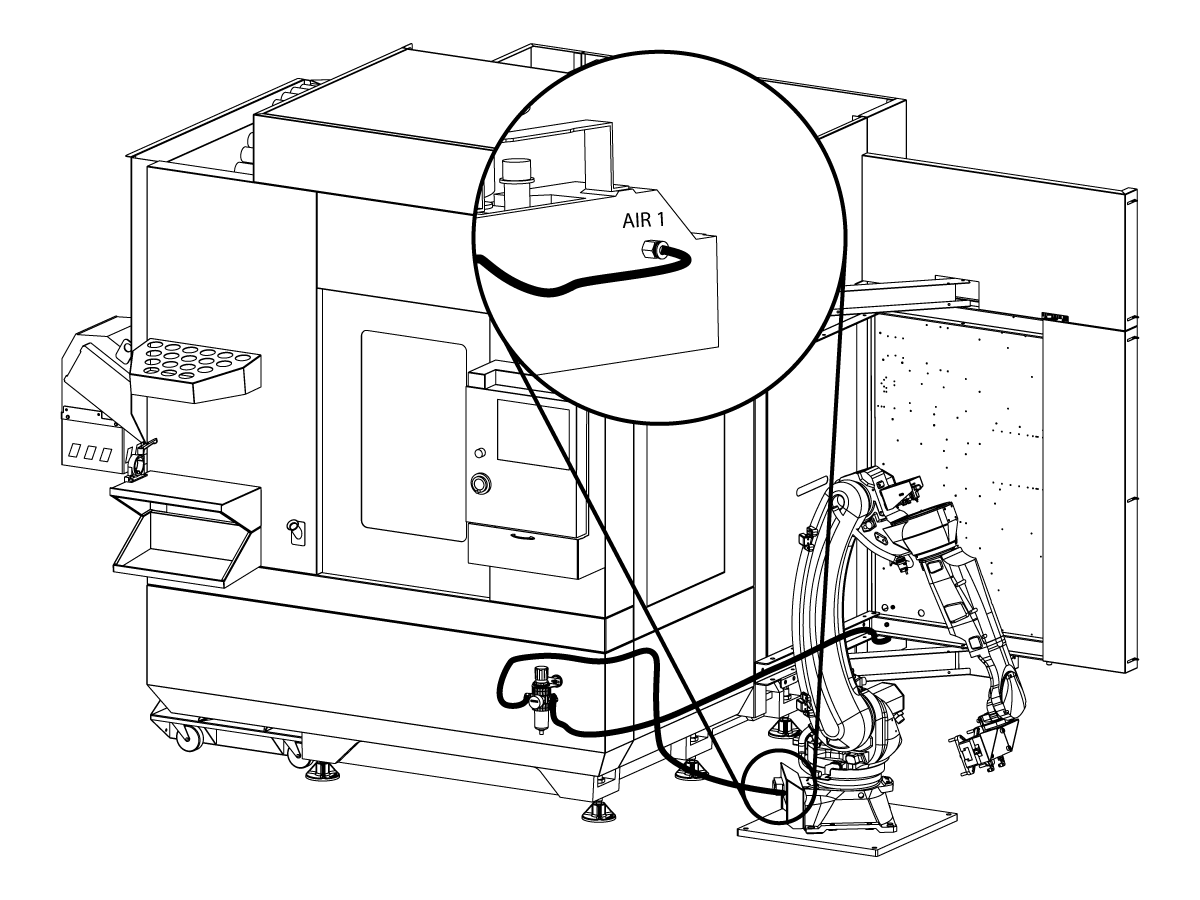
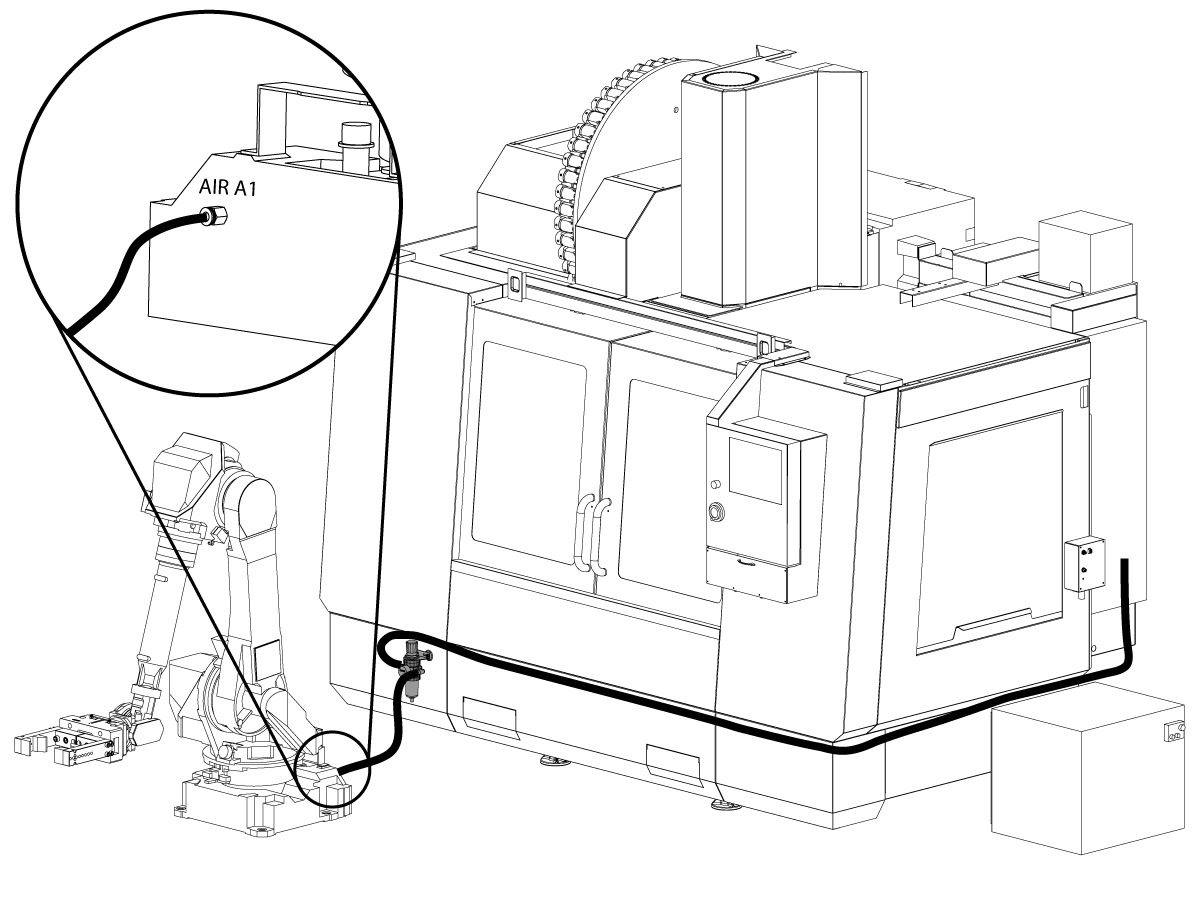
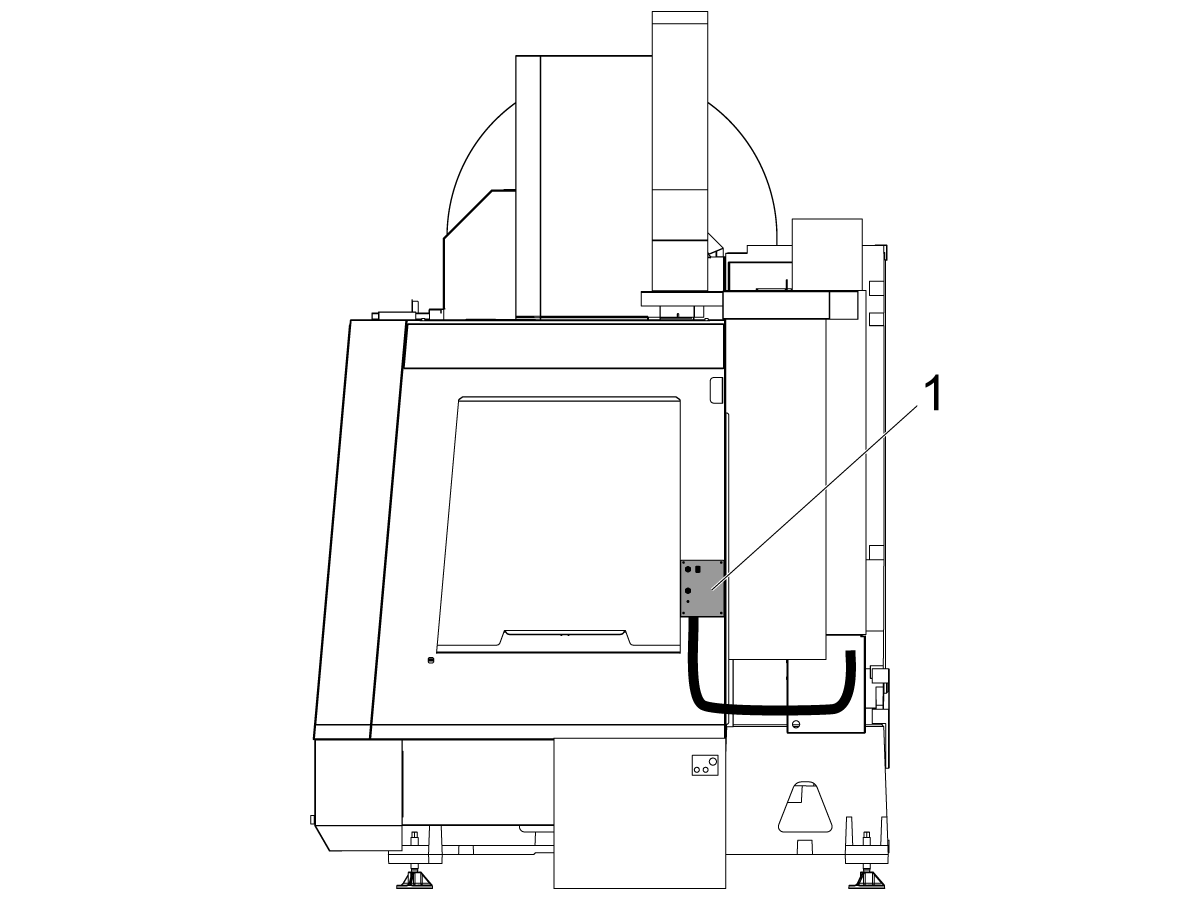
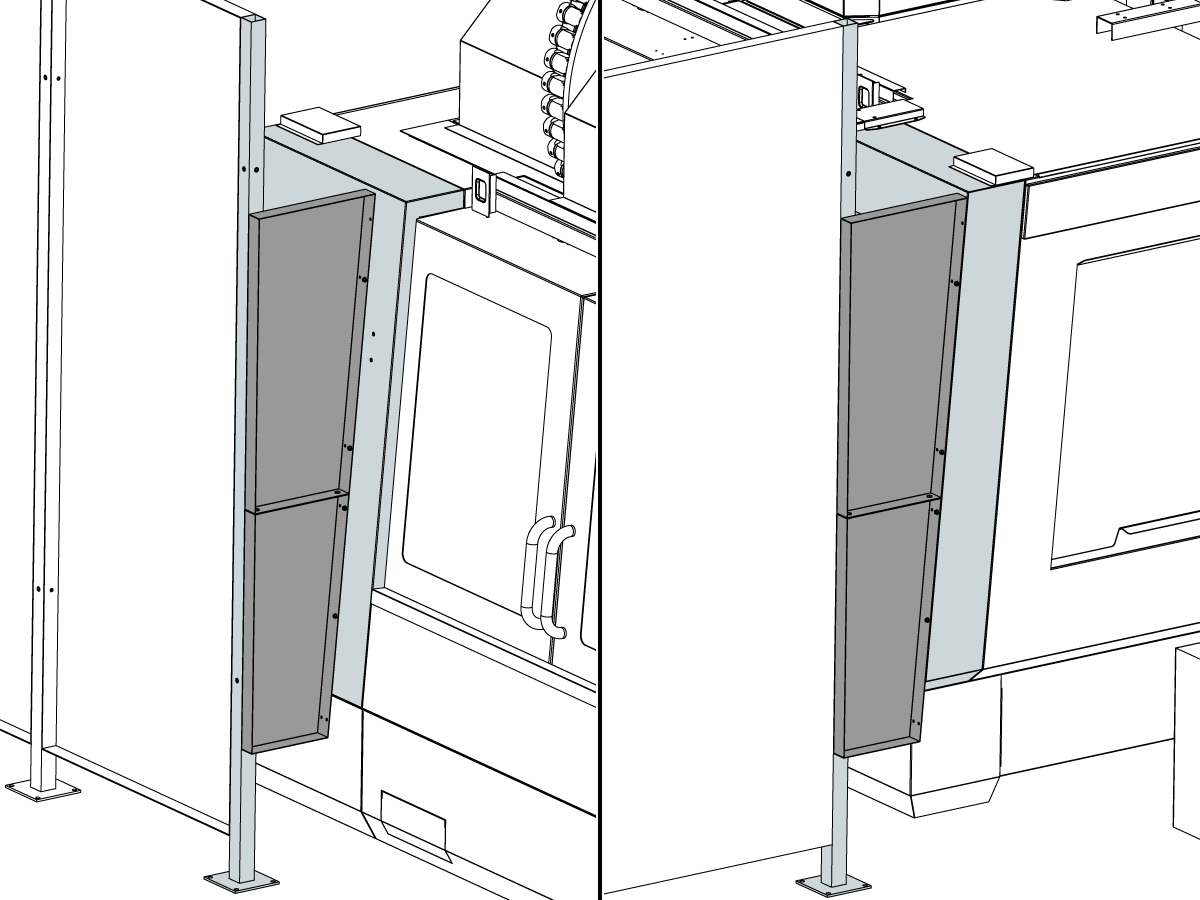
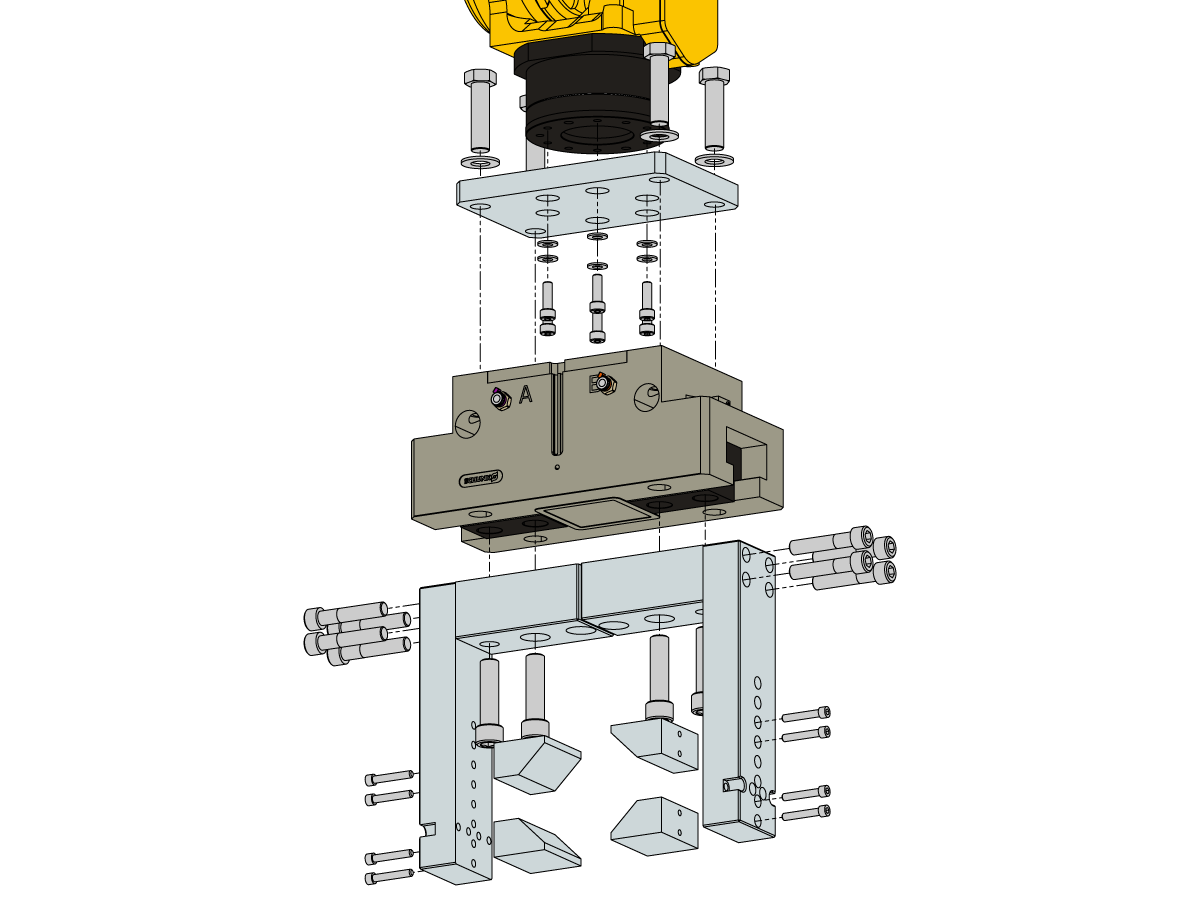
---vertical---installation/2019-10-08_15h56_48.jpg)