

/2026-04-VOP-SquareComponent.jpg/_jcr_content/renditions/cq5dam.thumbnail.319.319.png) 增值选件套
增值选件套
 主轴
主轴
 刀库
刀库
 第 4 轴 |第 5 轴
第 4 轴 |第 5 轴
 刀塔和动力刀
刀塔和动力刀
 探测
探测
 切屑和冷却液管理
切屑和冷却液管理
 Haas 控制系统
Haas 控制系统
 产品选项
产品选项
 刀具和夹具
刀具和夹具
 工件夹具
工件夹具
 5 轴解决方案
5 轴解决方案
 自动化
自动化

版本 A - 2025 年 5 月
此视频将指导您在 Haas HC10 协作机器人上对完整的零件设置进行编程。
注意:此视频仅供参考,不取代书面程序。
定期检查机床设备安全功能:
设置/运行模式操作
所有 Haas 数控设备的控制器侧面均安装了安全锁,以锁定和解锁设置模式。根据选定模式,机器人将具有以下行为。
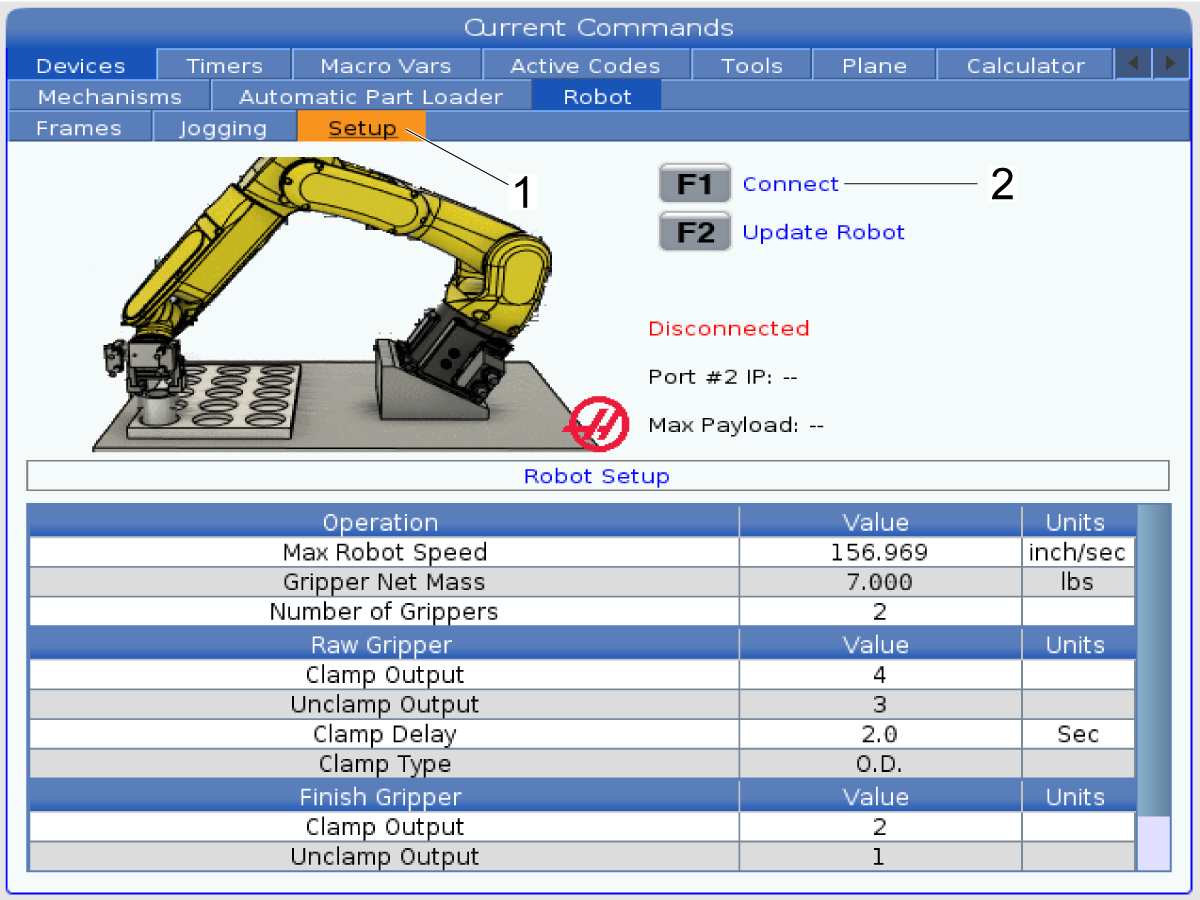
关闭示教控制器
警告 不要使用示教控制器上的电源按钮 [1] 来关闭示教控制器。否则可能会导致协作机器人控制柜内的系统文件丢失。
若要关闭示教控制器电源,请按右上角的 3 行按钮 [2] 以打开右侧的选项菜单。
选择“关闭”选项 [3] 以启动协作机器人控制柜断电程序。
重要: 不正确地关闭示教控制器可能会导致协作机器人控制柜中的关键文件损坏。如果发生这种情况,可能会导致协作机器人无法使用,直至系统文件重新安装到控制柜中。
在设置机器人作业前,您需要创建一个用户框架。用户框架将不在零件表内。这将设置 X、Y 和 Z 轴。
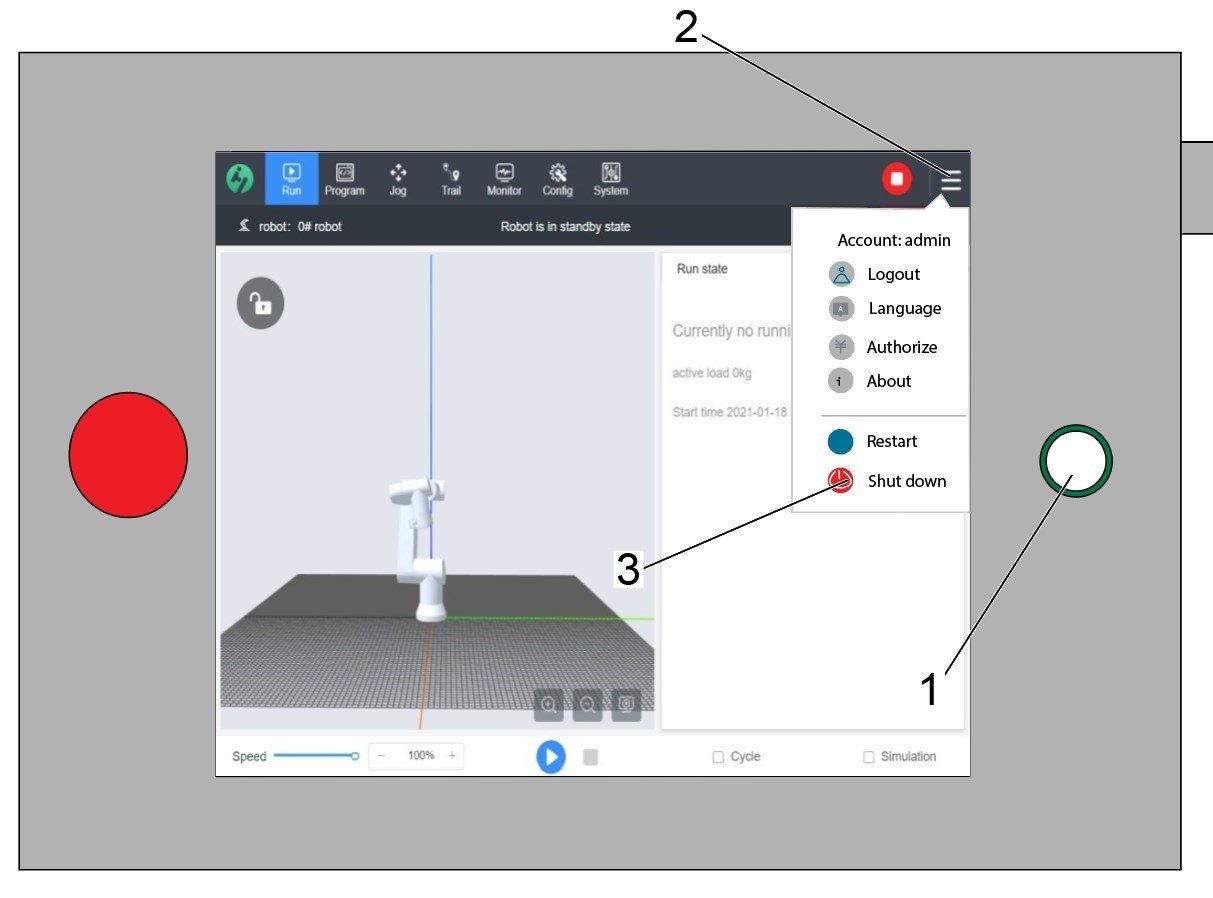
包含两种类型的可点动机器人。分别是笛卡尔和联合类型。
笛卡尔坐标系包括:
联合坐标系包括:


将“三点方法”用于设置我们的用户框架。导航到当前命令 > 设备 > 机器人 > 框架,然后按箭头以将框切换到“用户框架”窗口。
按[INSERT] 以使用“三点方法”。然后输入用户框架的名称,然后按 [F2] 以记录。
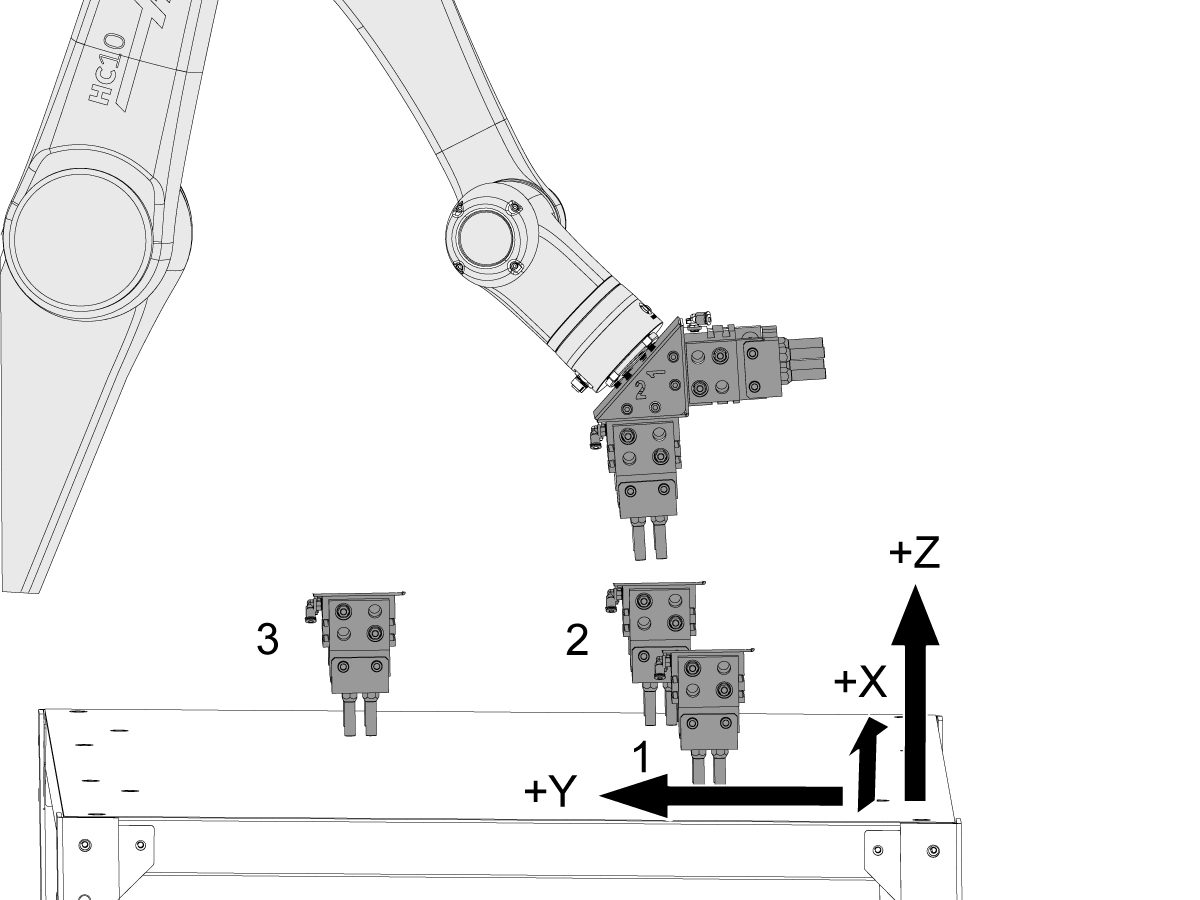
您记录的第一个点是定向点 [1]。设置方法为,使用夹持器 1 的夹爪在工作台向上和向下指。将机器人慢慢推至该位置。检查以确保所有 4 个夹持器全部位于工作台平面,与工件上的刀具仅一张纸的距离。设置定向点 [1] 后,按 [F2] 记录。
下一个点是 X 方向点 [2]。处于笛卡尔位置时,在 RJH 上记录 Z 位置。按 Z 方向上点动机器人,以在沿 X 方向点动时,使夹持器夹爪保持整洁。沿 X 方向点动机器人,然后返回至已记录位置。夹爪应触及工作台。使用一张纸将夹持器移动回工作台上。按 [F2] 记录 X 方向点 [2]。
沿 Y 方向 [3] 点动机器人。按 Z 方向上点动机器人,以在沿 Y 方向点动时,使夹持器夹爪保持整洁。沿 Y 方向点动机器人,然后返回至已记录位置。用一张纸触发夹持器夹爪。按 [F2] 记录 Y 方向点 [3]。

也可通过直接输入法设置用户框架。导航到当前命令 > 设备 > 机器人 > 框架,然后按箭头以将框切换到“用户框架”窗口。
按 [ENTER] 以查看“直接输入法”。若要将用户框架从机器人支架移开。输入用户框架名称并添加以下值:
示例:
这将使机器人沿 Z 轴旋转 180 度。机器人将沿 Z 轴、按垂直于工作台的方向点动,机器人电缆连接器指向正 X 方向。按 [ENTER]进行记录。

按 [Insert]以创建用户框架。导航至 Jogging(点动)选项卡,然后选择已创建用户框架,以使其激活。

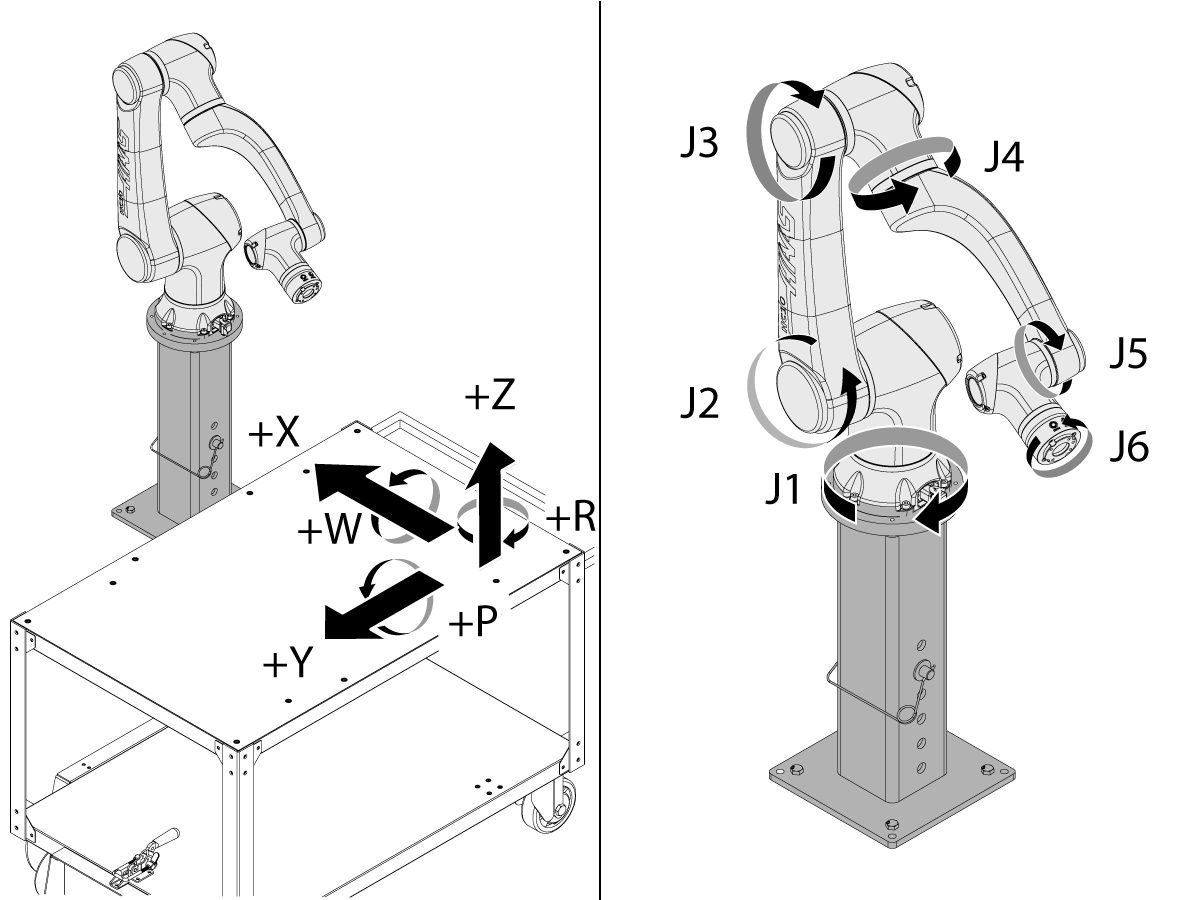
转到设置选项卡。更改以下内容:
重要提示:这个程序定义的机器人速度上限不得超过安全级别允许的速度。若要在协作机器人示教控制器上查看允许的速度,请导航到配置 > 一般限制。
警告:程序定义的机器人速度上限只能防止程序新定义的点超过这个机器人速度上限。这意味着更改机器人速度上限不会影响已创建的程序。
Haas 协作机器人套装:
警告:如果此值设置不当,可能会导致机器人臂无法适当移动。
硬爪
精加工夹持器

若要禁用机器人,以通过独立模式运行机床设备。按 [SETTING]。更改以下设置:
定期检查机床设备安全功能:
设置/运行模式操作
所有 Haas 数控设备的控制器侧面均安装了安全锁,以锁定和解锁设置模式。根据选定模式,机器人将具有以下行为。

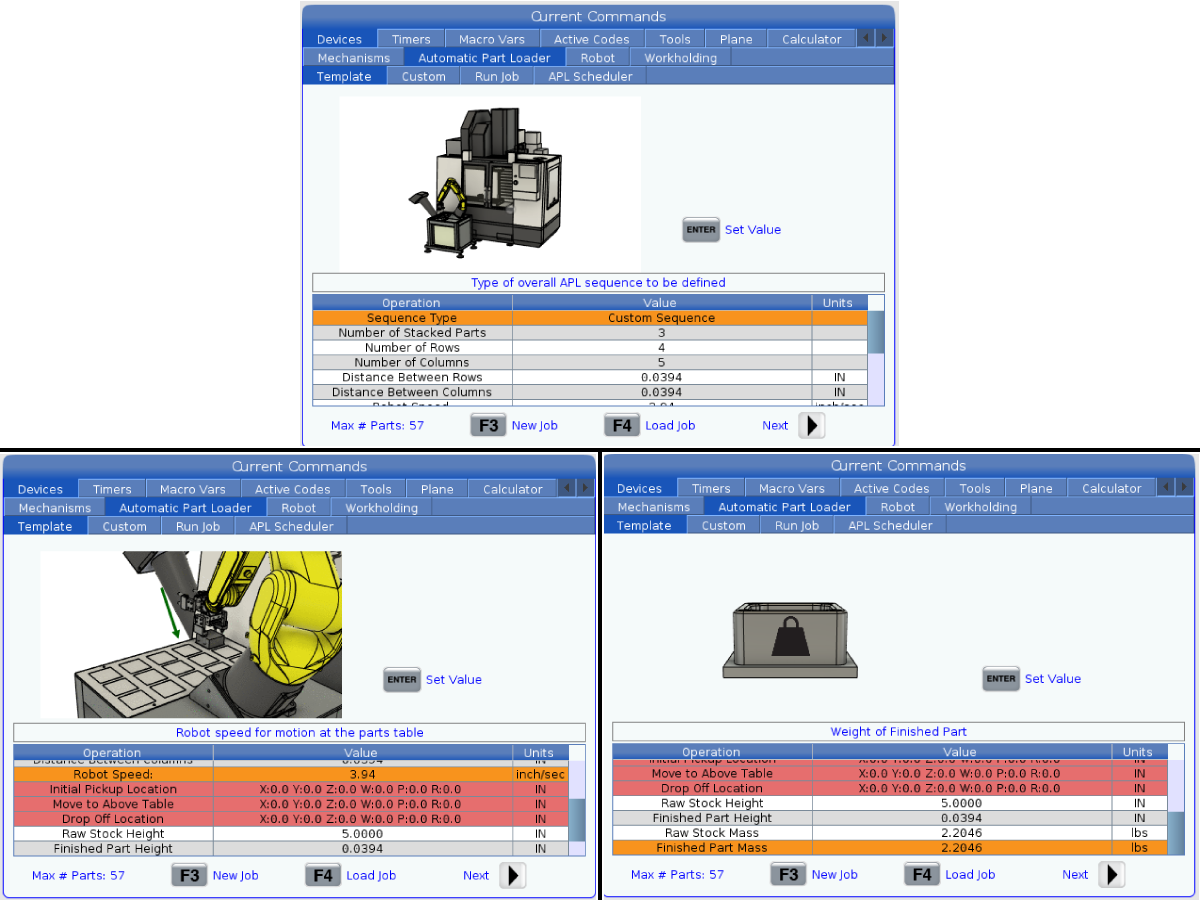
序列类型 – 输入 0 表示简单模板,输入 1 表示自定义序列。有关更多信息,请参阅“自定义序列”部分。
原料拾取方法 -输入 0 表示表格网格,输入 1 表示单点。
成品零件下放方法 –输入 0 表示单表,输入 1 表示双表,输入 2 表示单点。
堆叠工件数量 - 输入每个刀套的堆叠工件数量。最多 3 个零件。
说明:如果使用两个或三个零件的堆叠零件功能,原料拾取方法和成品零件下放方法都是独立工作台。第一零件位置必须为空。
行数 – 输入要在工作台上使用的行数。
列数 – 输入您要在工作台上使用的列数。
行间距离 –输入行间的增量距离。
列间距离 – 输入列间的增量距离。
原料高度 - 输入原料高度。
成品零件高度 - 输入成品零件高度。
零件翻转 –为两项操作作业启用零件翻转。
原料质量 –输入原始棒料的质量。
成品零件质量 - 输入成品零件的质量。如果启用了零件翻转,则操作 1。
成品双面零件质量 - 输入成品零件的质量。如果启用了零件翻转,则操作 2。
注意:净夹持器质量以及精加工和原始零件的值总和必须小于机器人的最大有效载荷。
示例:原料质量 [4.0 磅] + 成品零件质量[3.8 磅] + 净夹持器质量 [7.0 磅] < 最大有效载荷 [15.432 磅]。

注意:后续操作可使用以下命令:
机器人速度 –在零件表中输入机器人的运动速度。设置过程中,首先慢速执行,然后验证是否正常作业,更新速度至所需循环时间。

初始拾取位置 –点动夹持器 1 至零件工作台的首个零件位置。若要夹紧零件,首先按 [F3] ,然后按 [F2] 记录参考位置。
提示与技巧:拾取零件,并将零件重新对齐至模板上的首个零件位置,然后记录该位置。这可以更好地将夹持器与零件和工作台对齐。
移到上方工作台 – 在 Z 方向点动机器人以清除工作台上的所有零件,然后按 [F2] 以记录参考位置。此位置也为恢复位置。
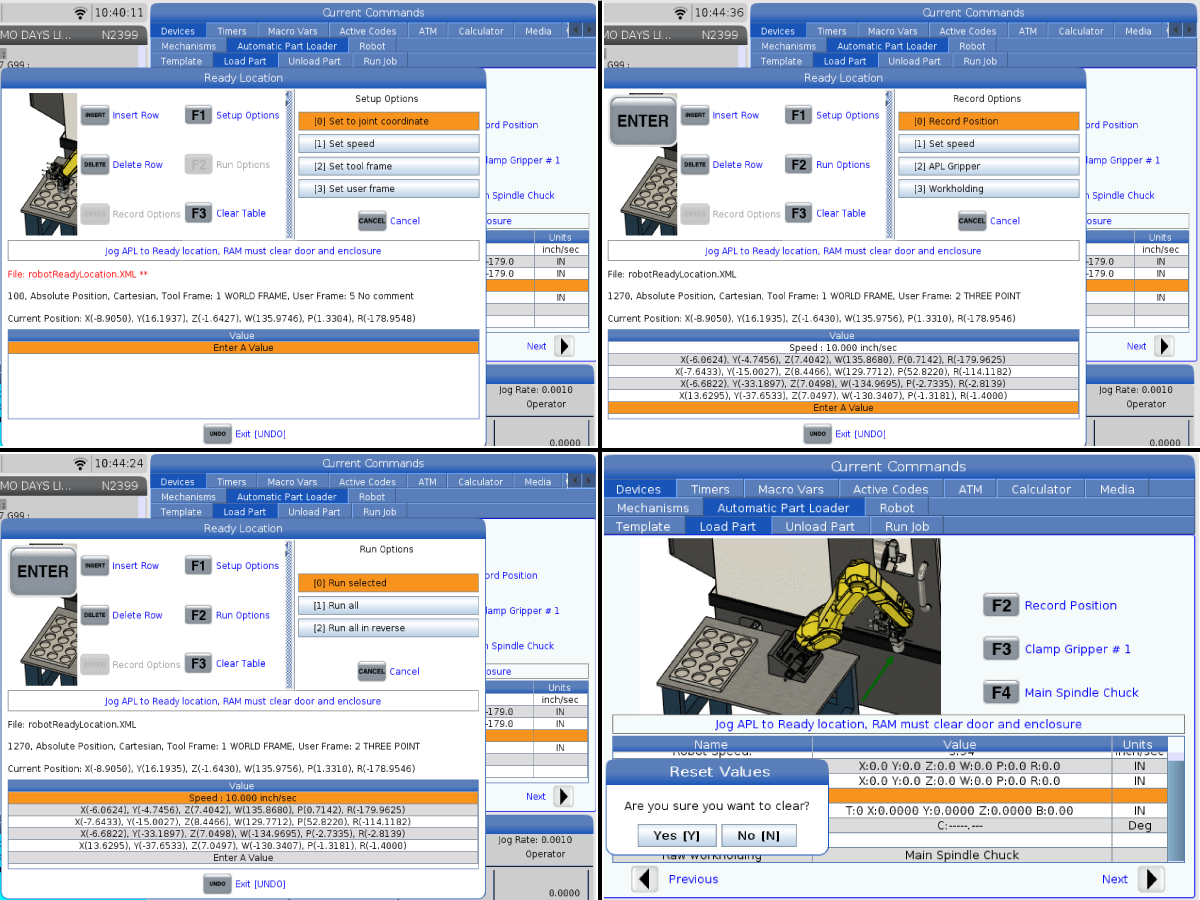
准备位置 –创建运动文件,将机器人从“上方工作台位置”移动至“准备位置”。该位置应位于门外,可旋转夹持器 1 以将零件置于卡盘内。
按 [F2] 创建运动文件,然后按 [F1] 设置选项。
旋转夹持器 1 时,将机器人从上方工作台位置点动到门外。记录路线位置,以保证运行顺畅。
提示与技巧: 将此运动文件的第一个点设置为远离 X 和 Y 方向的上方工作台位置。
按 [ENTER] 以记录选项。在您的运动文件中创建一个动作。
注意:机器人模板将打开/关闭夹持器和工件夹具。若要插入夹持器状态或工件夹具状态,则仅适用于使用零件翻转的高级作业
按 [F2] 以运行选项。
按 [F3] 以运行选项。
如果您需要清除运动文件,则按 [F3] 清理工作台。按 [Y] 以重置值,按 [N] 以取消。
确认运动后,按 [UNDO] 退出并保存运动文件。
提示与技巧:当您将夹持臂移向门时,通过查验 RJH 位置,查看并确保未绕组任何接头。通过按 RJH 左下角的 Linear(线性),可在“联合”模式和“笛卡尔”模式移动进行切换。
提示与技巧:“准备位置”运动文件中的至少一个点应以“联合”模式记录,而“准备位置”运动文件中的最后一个位置需要以“笛卡尔”模式记录。

装料安全轴位置 –轻推内轴,以确保在装载零件时换刀装置、刀具和 B 轴无异物。按[F2] 以记录参考位置。
C 轴定向位置 – 该字段用于设置上料时的卡盘方向。按屏幕说明设置值。
重要提示:没有 C 轴或主轴原点开关的车床无法保证可重复的主轴定向,因此,如果存在需要特定主轴定向的应用,则必须在设置作业时和运行任何作业之前检查并验证方向。
卡盘装载位置 –创建运动文件,以将机器人从“准备位置”移至“卡盘装载位置”。
提示与技巧:运动文件中记录的第一个位置应该是“准备位置”运动文件中的最后一个位置。该位置应位于门外,可旋转夹持器 1 以将零件置于卡盘内。
将机器人从“准备位置”点动至主轴中心线。松开工件夹具后,沿主轴中心线向夹盘点动夹持器 1。零件应位于硬爪中心,并紧靠硬爪背面。夹紧卡盘并检查零件的运动情况。调整以将零件居中放置到工件夹具内。
提示与技巧:将零件居中和夹紧工件夹具后,记录最后的位置。然后松开工件夹具,沿 Y 方向将零件电动至工件夹具外,记录并插入该位置,直至最后记录到的位置。
提示与技巧:在工件夹具中装载或卸载零件时,降低机器人速度以获得更高的精度。
硬爪工件夹具 –选择工件夹具机构以夹紧硬爪零件。

精加工工件夹具 –选择工件夹具机制,以夹紧精加工零件。
卡盘拾取位置 –创建运动文件,以将机器人从“准备位置”移至“卡盘拾取位置”。松开夹具 2 时,点动并旋转夹持器 2 至主轴中心线,然后定位并夹紧零件。夹紧夹具 2 时,请检查机器人的运动并进行调整,以使夹具相对于零件居中。

夹持器交换位置 –创建运动文件,将机器人从“卡盘拾取位置”移动到“夹持器交换位置”。沿主轴中心线向远离卡盘的方向轻推机器人,然后旋转夹持器,使夹持器 1 与主轴中心线对齐。
交换后装载 –创建运动文件,将机器人从“夹持器交换位置”移动到“卡盘装载位置”。松开工件夹具后,沿主轴中心线向夹盘点动夹持器 1。零件应位于硬爪中心,并紧靠硬爪背面。夹紧卡盘并检查零件的运动情况。调整以将零件居中放置到工件夹具内。
卸料运动 –创建运动文件,将机器人从“卡盘装载”移至“准备位置”。松开夹持器 1 时,沿主轴中心线向远离工件夹具和门外的方向轻推机器人,以达到“准备位置”。
精加工零件下放方法 –选择精加工零件的下方方法。输入 1 意为“独立工作台”,2 意为“对称双工作台”,3 意为“单点”。
工作台下放位置 – 将机器人从“准备位置”移动到工作台的首个零件位置。将零件置于工作台以上 0.0625”处,按 [F3] 以松开夹持器 2。按 [F2] 以记录参考位置。
通风 - 输入零件被移除后吹气打开所需秒数。
注意: 功能仅适用于安装了此选项的机床。 自动吹气 - 安装 .
注意: 此功能仅适用于安装了此选项的铣床。 可编程气动装置 - 安装 .
卡盘转速 –输入吹气期间主轴速度。
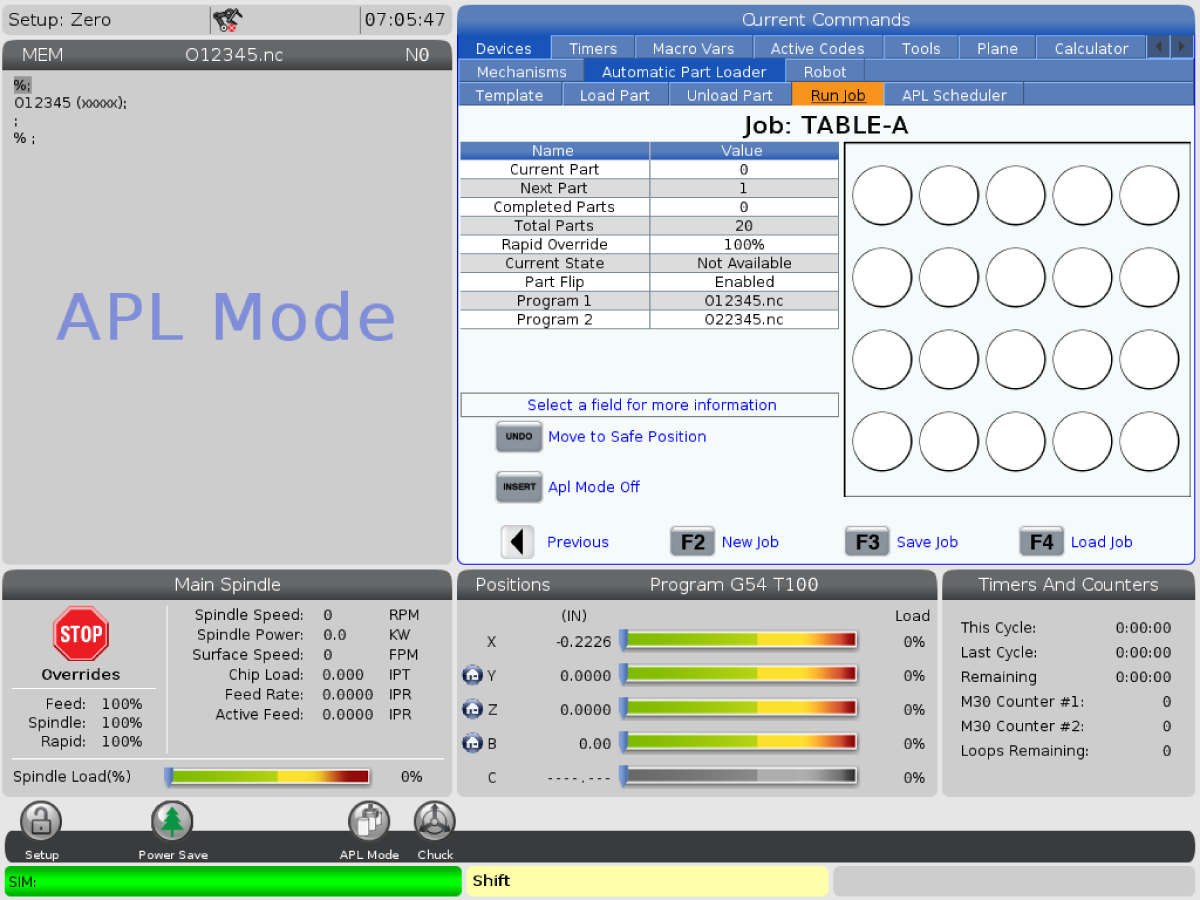
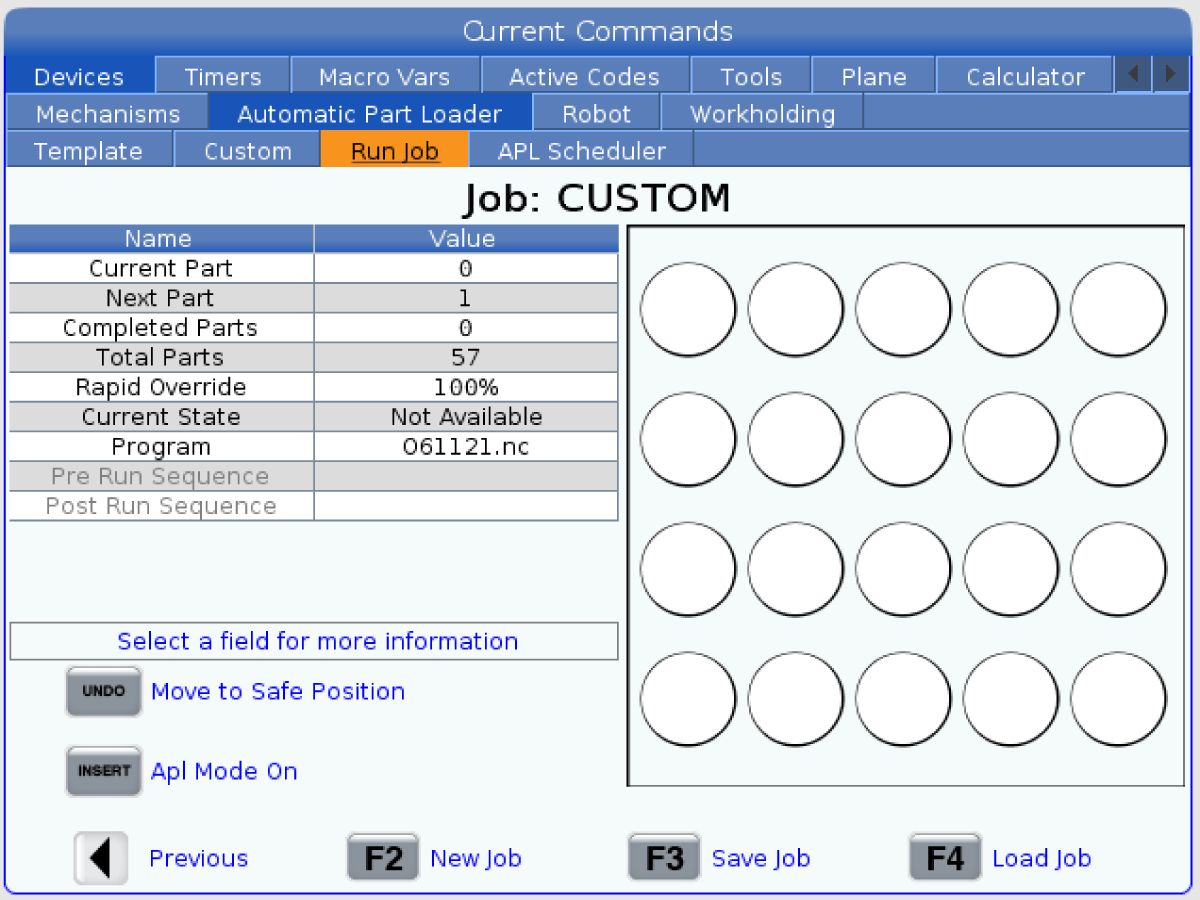
Run Job(运行作业)选项卡允许您加载/运行和保存作业。选项还可显示当前机器人模式状态和当前运行作业。如未保存任务,则任务文件名将显示红色,如果保存,则任务文件名称显示黑色。
输入预设任务名,按 [F3] 以保存任务并选择文件位置。若要在编辑后将任务保存到相同的文件位置,请按 [INSERT] 两次。
按[F4]以加载作业。
按[F2] 以创建新任务。
按[INSERT] 以打开/关闭 APL 自动装料器模式。
按[UNDO] 以将机器人移至安全位置。此位置是记录在“加载零件”选项卡上的“移至工作台上方”位置。如果未记录此位置,则此功能不可用。
警告:如果机器人没有处于从当前位置移动到“工作台上方”位置的安全位置,请勿使用此功能。
当前零件 - 更新字段,序列进入规定数值。
下一零件 –计数器显示下一零件。
完成零件 –计数器显示已完成零件的数量。按 [ORIGIN]键可重置此字段。
零件总数 – 可更改此字段。序列将一直更新,直至成品零件数与零件总数持平。需运行部分工作台 设置为 0,表示无限制。
快速超控 – 显示当前快速超控状态。
当前状态 –显示当前 APL 状态。
零件翻转: 如果启用了零件翻转,则需要为 OP 1 和 OP 2 选择程序。
程序: - 与此任务一起执行的专用程序。(如果当前任务未启用零件翻转,则为可选。)
---vertical---installation/2019-10-08_15h56_48.jpg)
加工程序第一部分,必须将 SLUG 正确固定在卡爪肩部,否则停止操作。可使用哈斯弹簧柱塞或其他定制工具。与刀具一样的是,柱塞必须配置自己的刀具偏置值和刀塔。
设置作业后 ,按[INSERT]以打开 APL 模式。
注意: APL 模式下,机床执行 M299 代码时控件将加载下一个零件。未运行 APL 模式时,M299 在程序末尾代替 M30 或 M99 。
更多编程信息,请参见 操作手册。
按 CYCLE START(循环开始)以启动程序。
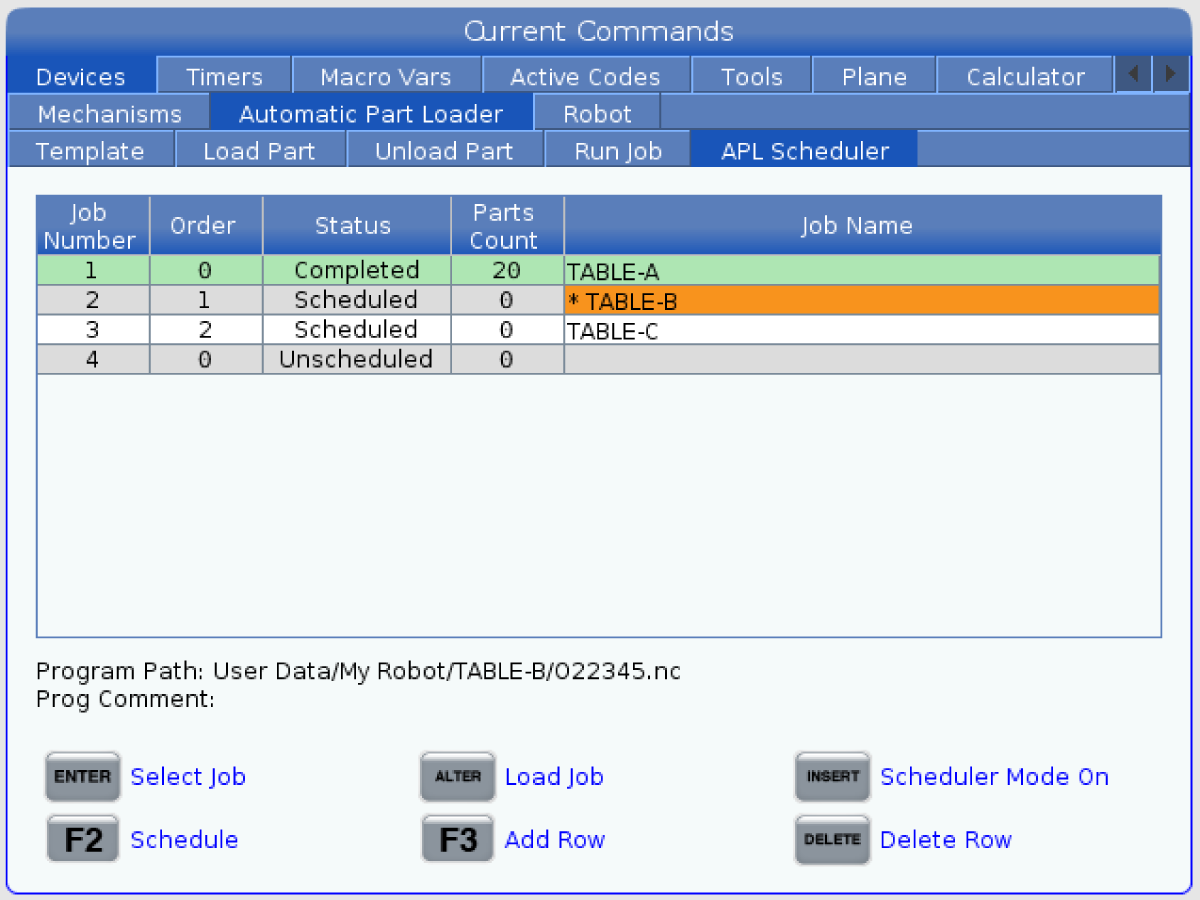
APL 调度程序选项卡允许用户调度机器人任务。
注意: 将“设置131”设置为“关”以运行安排的任务。
任务编号:指定任务编号。按一下[ENTER] 以为任务创建程序注释。
顺序:指定任务的顺序。可以对其进行编辑以更改安排的任务的顺序。按一下[ENTER] 以设置任务顺序。
状态:指定任务是未安排的、已安排的还是已完成。按一下[ENTER] 以显示任务状态选项。
零件计数:指定当前安排的任务已运行了多少零件。按一下[ENTER] 以设置零件数。
任务名称:这允许用户选择机器人任务 XML。按一下[ENTER]以选择机器人任务。
程序路径:显示为任务选择的程序路径。在“运行任务”选项卡中选择了该程序。
程序注释:显示用户输入的程序注释。
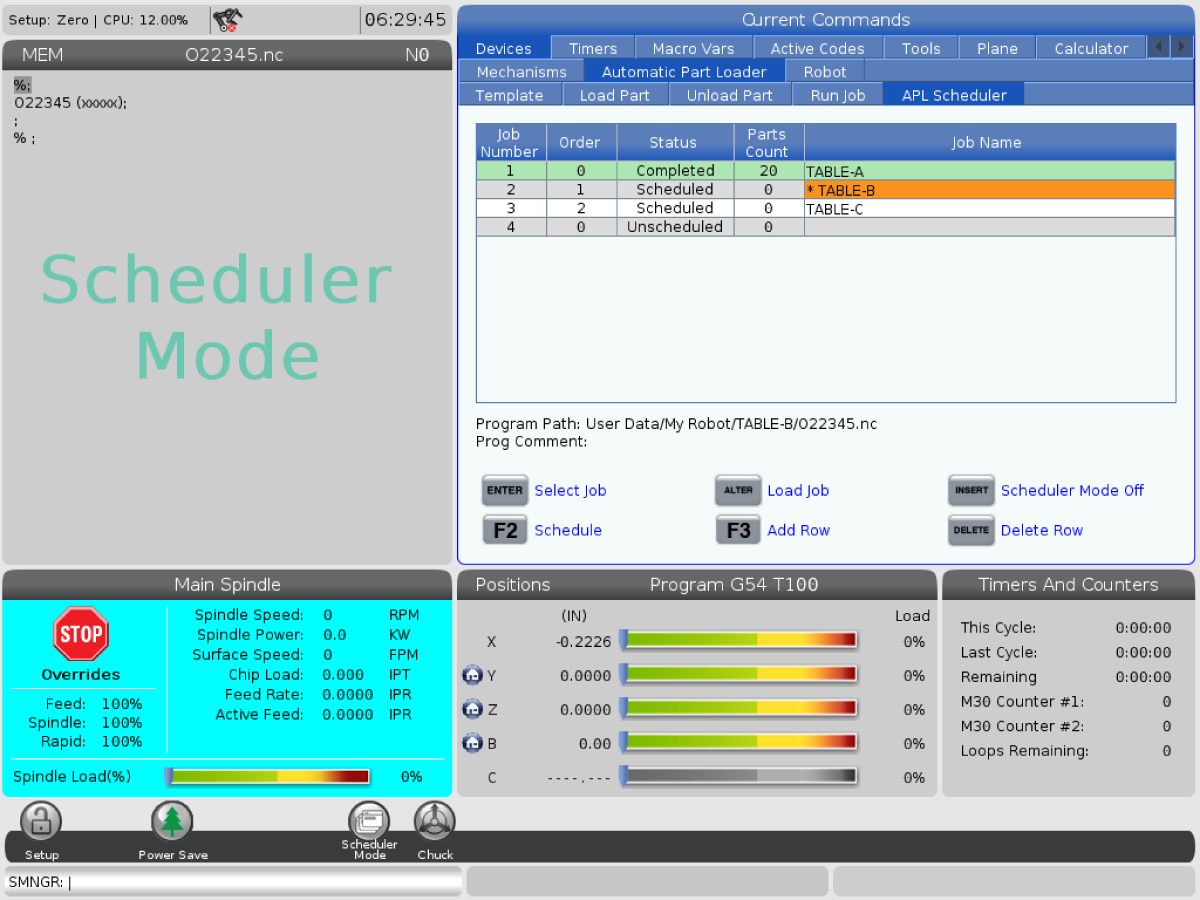
[ENTER] 在当前列上变化。有关列信息,请参见上一部分。
[ALTER] 加载作业。将突出显示的任务加载到“运行任务”选项卡中。
[INSERT] 调度程序模式开/关。这将打开或关闭调度程序模式。必须将其设置为“开”以运行任务安排。遵循与 APL 模式相同的规则。
[F2] 调度。安排突出显示的任务。
[F3] 添加行。将新的任务编号添加到 APL 调度程序中。
[DELETE] 删除行。删除所选任务。安排的任务无法删除。
说明:在移动到 APL 调度程序中的下一个作业之前,机器人将移动到当前作业的就绪位置。确保所有作业的就绪位置都是安全位置且没有障碍物。
定期检查机床设备安全功能:
设置/运行模式操作
所有 Haas 数控设备的控制器侧面均安装了安全锁,以锁定和解锁设置模式。根据选定模式,机器人将具有以下行为。
序列类型 – 输入 0 表示简单模板,输入 1 表示自定义序列。
堆叠工件数量 - 输入每个刀套的堆叠工件数量。最多 3 个零件。
注意:如果使用两个或三个零件的堆叠零件功能,原料拾取方法和成品零件下放方法都是独立工作台。第一零件位置必须为空。
行数 – 输入要在工作台上使用的行数。
列数 – 输入您要在工作台上使用的列数。
行间距离 –输入行间的增量距离。
列间距离 – 输入列间的增量距离。
机器人速度 –– 在零件表中输入机器人的运动速度。
初始拾取位置 – 点动夹持器 1 至零件工作台的首个零件位置。夹紧零件,然后按 [F2] 以记录参考位置。
提示与技巧:拾取零件,并将零件重新对齐至模板上的首个零件位置,然后记录该位置。 这可以更好地将夹持器与零件和工作台对齐。
移到上方工作台 – 在 Z 方向点动机器人以清除工作台上的所有零件,然后按s [F2] 以记录参考位置。此位置也为恢复位置。
工作台下放位置 – 将机器人从“准备位置”移动到工作台的首个零件位置。将零件置于工作台以上 0.0625" 处,松开夹持器 2。按 [F2] 以记录参考位置。
原料高度- 输入原料高度。
成品零件高度- 输入成品零件高度。
原料质量 –输入原始棒料的质量。
成品零件质量 - 输入成品零件的质量。
示例: 原料质量s [4.0 lbs] + 成品零件质量 [3.8 lbs] + 净夹持器质量 [7.0 lbs] < 最大有效载荷 [15.432 lbs]。

自定义选项卡允许用户创建一组用户定义的序列。每行都是一个带有别名代码、序列描述和文件名的序列。
该序列在程序中用 M300 Pn 调用。P 代码编号对应于当前自定义序列中的别名代码。
文件: 显示当前已加载的自定义序列路径。如果文件路径为红色,则表示已编辑但未保存。文件类型是 .SQC。
[INSERT] 在突出显示的序列上方插入一行。
[DELETE] 删除突出显示的序列。
[ALTER] 重命名自定义序列。
[ORIGIN] 清除自定义序列表。
[ENTER] 加载已保存的运动文件。
[F2] 打开记录器窗口。请参阅下面的自定义记录器步骤。
[F3] 保存自定义序列 以及所创建的序列文件。
[F4] 加载已保存的自定义序列。
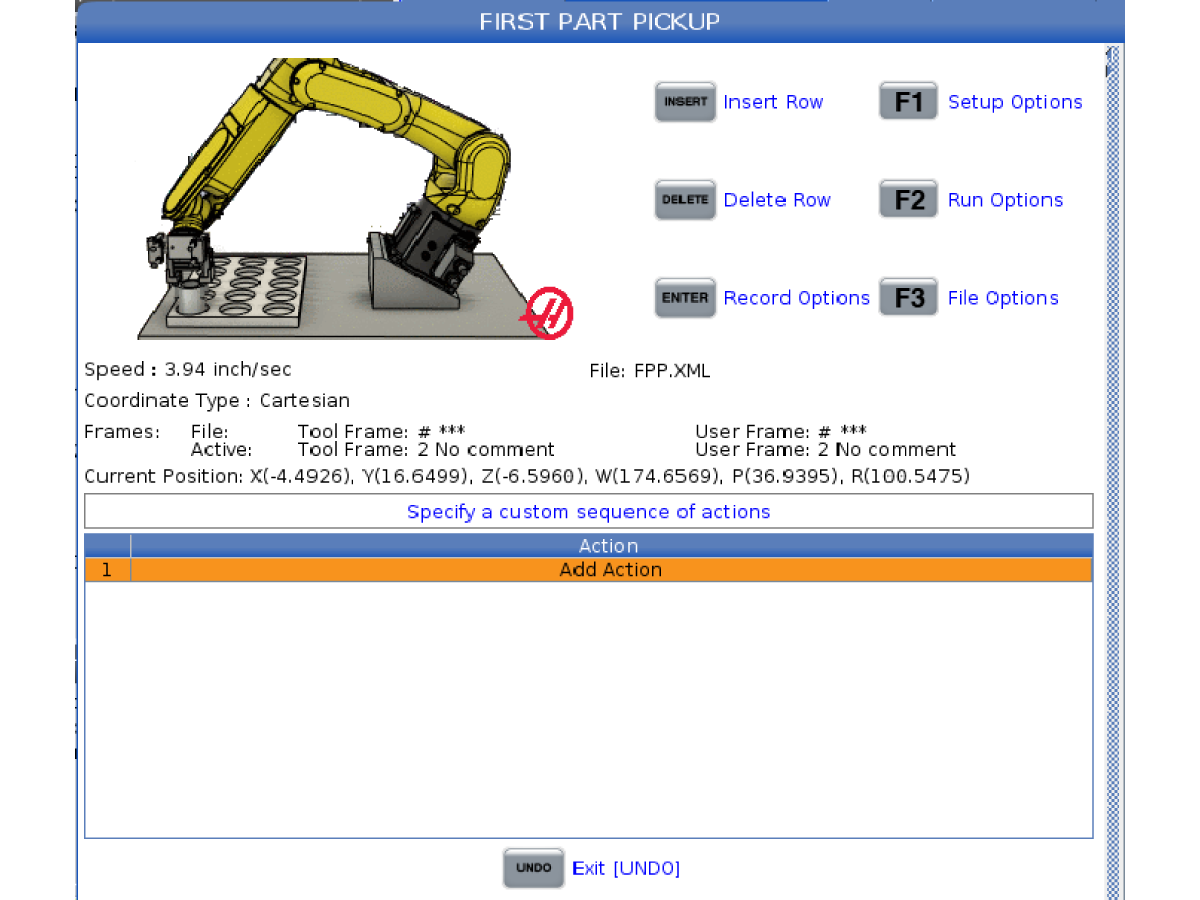
按下 [F2] 以打开 自定义记录器窗口,这允许用户创建自定义运动文件。
按[INSERT] 插入一个新的行。
[DELETE] 删除当前突出显示的行。
[ENTER] 记录选项。
[F1] 设置选项。
[F2] 以运行选项。
[F3] 以运行选项。
Run Job(运行作业)选项卡允许您加载/运行和保存作业。选项还可显示当前机器人模式状态和当前运行作业。如未保存任务,则任务文件名将显示红色,如果保存,则任务文件名称显示黑色。
输入预设任务名,按 [F3] 以保存任务并选择文件位置。若要在编辑后将任务保存到相同的文件位置,请按 [INSERT] 两次。
按[F4]以加载作业。
按[F2] 以创建新任务。
按[INSERT] 以打开/关闭 APL 自动装料器模式。
按[UNDO] 以将机器人移至安全位置。此位置是记录在“加载零件”选项卡上的“移至工作台上方”位置。如果未记录此位置,则此功能不可用。
警告:如果机器人没有处于从当前位置移动到“工作台上方”位置的安全位置,请勿使用此功能。
当前零件 - 更新字段,序列进入规定数值。
下一零件 –计数器显示下一零件。
完成零件 –计数器显示已完成零件的数量。按 [ORIGIN]键可重置此字段。
零件总数 – 可更改此字段。序列将一直更新,直至成品零件数与零件总数持平。需运行部分工作台 设置为 0 表示无限制零件。
快速超控 – 显示当前快速超控状态。
当前状态 –显示当前 APL 状态。
程序: - 与此任务一起执行的专用程序。(如果当前任务未启用零件翻转,则为可选。)
预运行序列: - 如果在 APL 调度程序中运行,则在此作业之前执行的可选步骤。它可用于准备和定位 APL/机器人以供执行。
运行后序列: - 如果在 APL 调度程序中运行,则在此作业结束时执行的可选步骤。它可用于在作业之间将 APL/机器人移动到安全位置。
加工程序第一部分,必须将 SLUG 正确固定在卡爪肩部,否则停止操作。可使用哈斯弹簧柱塞或其他定制工具。与刀具一样的是,柱塞必须配置自己的刀具偏置值和刀塔。
设置作业后 ,按[INSERT]以打开 APL 模式。
注意: APL 模式下,机床执行 M299 代码时控件将加载下一个零件。未运行 APL 模式时,M299 在程序末尾代替 M30 或 M99 。
更多编程信息,请参见 操作手册。
按 CYCLE START(循环开始)以启动程序。
%
O61121(自定义程序);
(#62715 = 当前零件);
(#62719 = 最大零件号);
(P1 = 首个零件拾取);
(P2 = 准备就绪);
(P3 = 将零件装入卡盘);
(P4 = 卸载已完成零件);
(P5 = 放下零件);
;
M97 P10(调用机器人加载程序);
M98 P111(零件加工程序);
M97 P20(调用机器人卸载程序);
;
M99
;
N10(机器人加载程序);
M300 P1(首个零件拾取);
M300 P2(准备就绪);
;
T4 G00 Y-1。Z-2。(将内轴移动到安全位置);
;
M80 (DOOR OPEN);
;
G04 P5。(门打开);
;
M300 P3(将零件装入卡盘);
M300 P3 R0(返回至就绪);
;
M81 (DOOR CLOSE);
;
G04 P3。(关门);
;
M99
;
N20(机器人卸载程序);
T4 G00 Y-1。Z-2。(将内轴移动到安全位置);
;
M80 (DOOR OPEN);
;
G04 P2. (门打开);
;
M300 P4(卸载已完成零件);
;
M300 P4 R0(返回至就绪);
;
N200;
;
M81 (DOOR CLOSE);
;
G04 P2. (关门);
;
N210;
M300 P2 R0(移至卸货台);
M300 P5(放下零件);
;
G04 P5.;
;
N215;
G103 P1(宏分配的预读限制);
IF [ #62715 GT #62719 ] GOTO50;
(拾取下一个零件并将其置于就绪状态);
G103;
M99
;
N50;
M299;
;
%
这是带有单个夹持器的机器人的自定义序列示例。
M300 Pn R0反向播放序列。
M300 Pn Q0 在程序的后台播放序列。
注意: 当运动文件反向运行时,M300 Pn R0 忽略所有与机器人无关的指令。一些指令被忽略的例子:机器停顿、自动门指令、工件夹持指令和主轴定向。
1. 确保在点动机器人时处于笛卡尔坐标系中。这更易于点动机器人,因为它同时移动多个关节。
a. 切换:机器人 > 点动 > 坐标类型 > 笛卡尔
2. 记录机器人位置时,点动一根轴,然后记录位置。请勿移动多个轴并记录,否则在运行完整序列时可能会导致机器人崩溃。
a. 机器人将采用从 A 点到 B 点的最短路径,因此如果您移动多个轴,则机器人可能会撞到自身、机床或触发点动限制警报。
b. 记录位置时,请确保从上一个指令位置开始。
3. 将加工零件的程序部分应该在一个单独的程序中。在您将机器人从机器上移开并关上门后,将其作为子程序运行。
a. 这是为了将 M300 调用与设计用于加工零件的程序相互分开。
4. 将自定义作业分成多个序列。不要尝试创建一个可以运行整个作业的运动序列。
5. 完成运动序列后,运行完整文件以了解运动将是什么样的。
a. 确保从将运行的最后一个运动序列的结束位置开始。
6. 如果您收到点动限制机器人警报,则需要重新记录导致警报的序列。
a. 机器人从 A 点到 B 点的路径超过了一个或多个关节限制。
提示与技巧: 在工件夹具中装载或卸载零件时,降低机器人速度可获得更好的精度。
APL 调度程序选项卡允许用户调度机器人任务。
注意: 将“设置131”设置为“关”以运行安排的任务。
任务编号:指定任务编号。按一下[ENTER] 以为任务创建程序注释。
顺序:指定任务的顺序。可以对其进行编辑以更改安排的任务的顺序。按一下[ENTER] 以设置任务顺序。
状态:指定任务是未安排的、已安排的还是已完成。按一下[ENTER] 以显示任务状态选项。
零件计数:指定当前安排的任务已运行了多少零件。按一下[ENTER] 以设置零件数。
任务名称:这允许用户选择机器人任务 XML。按一下[ENTER]以选择机器人任务。
程序路径:显示为任务选择的程序路径。在“运行任务”选项卡中选择了该程序。
程序注释:显示用户输入的程序注释。
[ENTER] 在当前列上变化。有关列信息,请参见上一部分。
[ALTER] 加载作业。将突出显示的任务加载到“运行任务”选项卡中。
[INSERT] 调度程序模式开/关。这将打开或关闭调度程序模式。必须将其设置为“开”以运行任务安排。遵循与 APL 模式相同的规则。
[F2] 调度。安排突出显示的任务。
[F3] 添加行。将新的任务编号添加到 APL 调度程序中。
[DELETE] 删除行。删除所选任务。安排的任务无法删除。
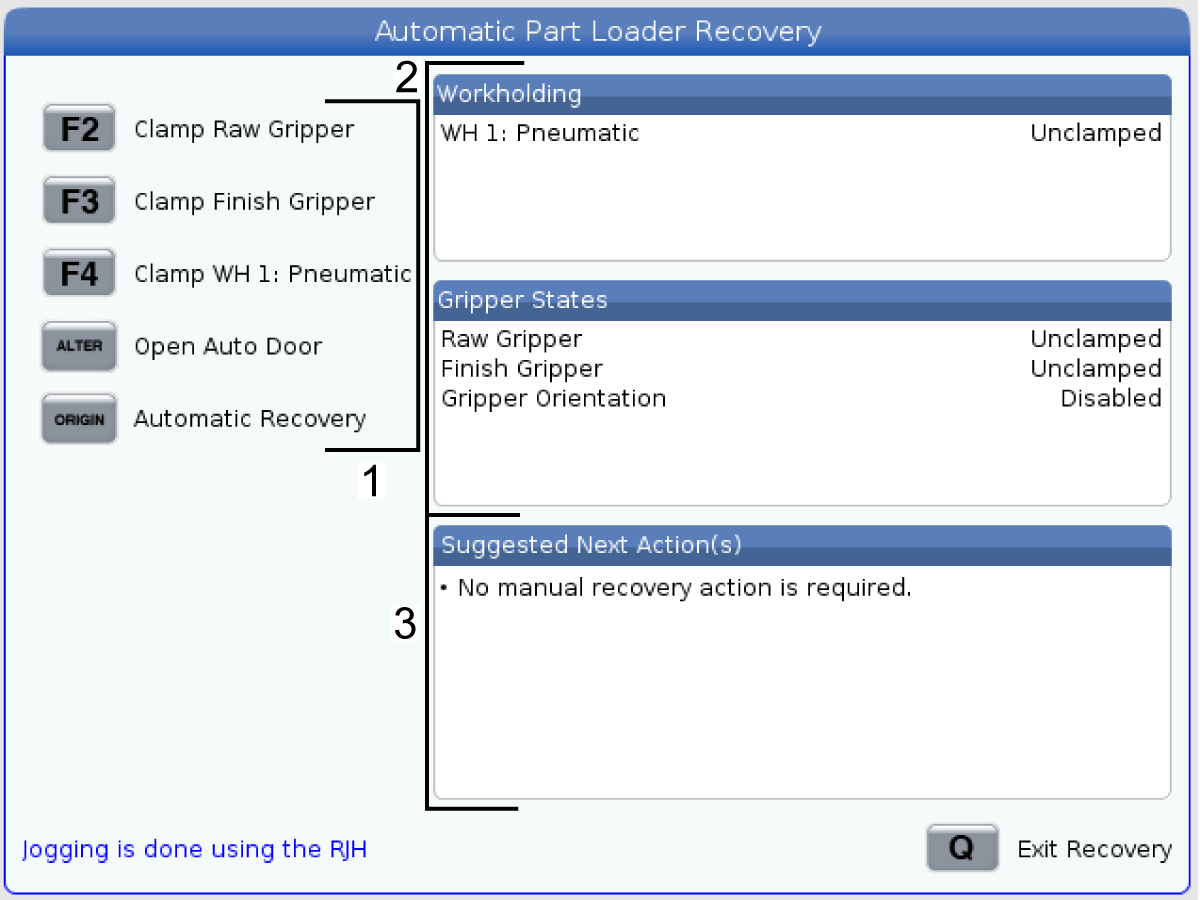
如果APL自动装料器循环中断,则必须输入[RECOVER] 模式以纠正或完成循环。
按[RECOVER],恢复页面将显示工件夹具/夹持器状态和建议的后续操作。
自动上料机恢复显示画面:
[F2]夹紧硬爪。这将夹紧生爪。
[F3] 夹紧精加工卡爪。这将夹紧精加工卡爪。
[F4]夹紧/松开工件夹具。这将夹紧/松开工件夹具。
[ALTER] 打开/关闭自动门。这将打开或关闭自动门。
[ORIGIN]自动恢复。这将尝试把 APL 自动恢复到工作台上方位置。需要在机器人模板中设置安全位置。
警告: 如果机器人没有处于从当前位置移动到“工作台上方位置”的安全位置,请勿使用此功能。
[Q] 退出恢复。这将退出 APL 恢复显示画面。

Recently Viewed Items
You Have No Recently Viewed Items Yet

此价格包含运费、出口和进口关税、保险费以及任何在运送至与您(买家)商定的位于法国的某一地点的过程中产生的其他费用。在 Haas 数控产品的交付中不会添加任何其他强制性费用。
随时掌握 HAAS 最新提示和技术……
HAAS TOOLING 接受以下条件:


This site is protected by reCAPTCHA and the Google Privacy Policy and Terms of Service apply.

2800 Sturgis Rd., Oxnard, CA 93030 / Toll Free: 800-331-6746
Phone: 805-278-1800 / Fax: 805-278-2255





