-
機械
-
 立型マシニングセンター
立型マシニングセンター
立型マシニングセンター
立型マシニングセンター -
 多軸制御ソリューション
多軸制御ソリューション
多軸制御ソリューション
多軸制御ソリューション -
 旋盤
旋盤
旋盤
旋盤 -
 横型マシニングセンタ
横型マシニングセンタ
横型マシニングセンタ
横型マシニングセンタ -
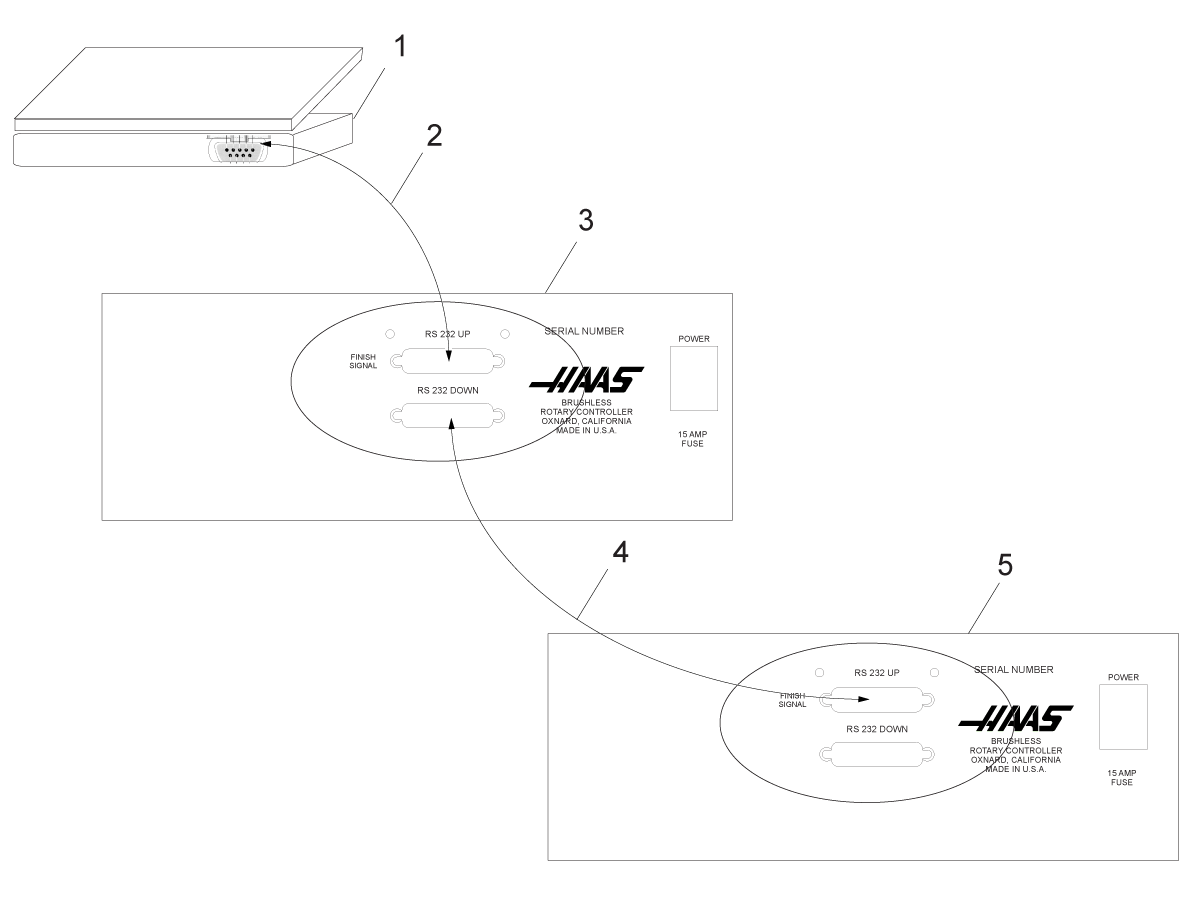
 ロータリーとインデクサ
ロータリーとインデクサ
ロータリーとインデクサ
ロータリーとインデクサ -
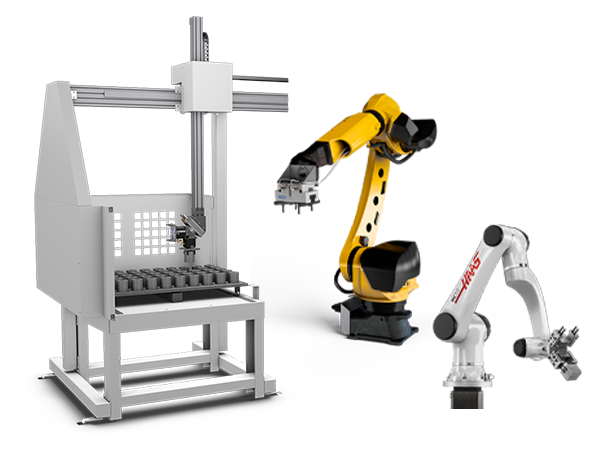 オートメーション システム
オートメーション システム
オートメーション システム
オートメーション システム -
 デスクトップ機械
デスクトップ機械
デスクトップ機械
デスクトップ機械 -
 工場機器
工場機器
工場機器
工場機器
ショッピングツール -
- オプション
-
Why Haas
Haasの特徴を見る
-
サービス
Haas Service へようこそ
- ビデオ