

/2026-04-VOP-SquareComponent.jpg/_jcr_content/renditions/cq5dam.thumbnail.319.319.png) 增值选件套
增值选件套
 主轴
主轴
 刀库
刀库
 第 4 轴 |第 5 轴
第 4 轴 |第 5 轴
 刀塔和动力刀
刀塔和动力刀
 探测
探测
 切屑和冷却液管理
切屑和冷却液管理
 Haas 控制系统
Haas 控制系统
 产品选项
产品选项
 刀具和夹具
刀具和夹具
 工件夹具
工件夹具
 5 轴解决方案
5 轴解决方案
 自动化
自动化

Your document is ready for download, please click below to download your document.
Download DocumentError processing this document, please try again or 联系我们.
Please wait while your document is being loaded.

AD0552
Your document is ready for download, please click below to download your document.
Download DocumentError processing this document, please try again or 联系我们.
Please wait while your document is being loaded.
此程序所述为如何升级 RJH-T 机器人,以使用 RJH-XL 组件。若安装 RJH-XL,请按照 遥控首轮 - XL - 安装 程序。
机床要求:
警告: 由于不将跳线置于垂直位置,RJH-XL 上的急停功能被禁用,机床被视为不安全。跳线必须为垂直插入。
注意“” 使用该程序来更新 SKBIF 和 RJH 固件: SKBIF PCB / RJH FIRMWARE UPDATE - NGC
本文档适用于以下套件:
注意: 您可通过 Haas 业务中心下载上述所有软件和固件文件。
危险:使用数控设备所需的电气服务非常危险,可能会导致严重伤害或死亡。
在将电线连接到数控设备之前:
如果您不确定如何安全地断开电源或执行 LOTO 程序:
如果不遵守这些预防措施,可能会导致触电、设备损坏或致命伤害。
危险:在控制柜内开始任何工作之前,请确认 320V 电源/矢量驱动的高压指示灯已熄灭至少五 (5) 分钟。这段等待时间可确保剩余电压消散并降低触电风险。
某些服务程序涉及高风险电气部件,可能会造成严重伤害或致命危险。技术人员不得尝试执行任何程序,除非已完全了解涉及的步骤和相关风险。
如果对程序有任何疑问,请联系 Haas 专卖店 (HFO) 以安排符合资质的维修技术人员。

1. 从围栏上移除初始前盖和远程急停接线盒。
2. 从初始前盖上移除底座。
3. 安装底座和电缆 33-8550C 以升级前盖。将 33-0712 从底座插入电缆 33-8550C。
4. 将远程 RJH 接口箱以垂直位置安装至围栏。将前盖安装至 RJH 箱。
---installation---ad0533/skbif_set_jumpers.png)
从水平位置卸下 SKBIF 上的跳线JP2 和 JP3[1],并在垂直位置上进行更换。
警告:由于不将跳线置于垂直位置,RJH-XL 上的急停功能被禁用,机床被视为不安全。跳线必须为垂直插入。
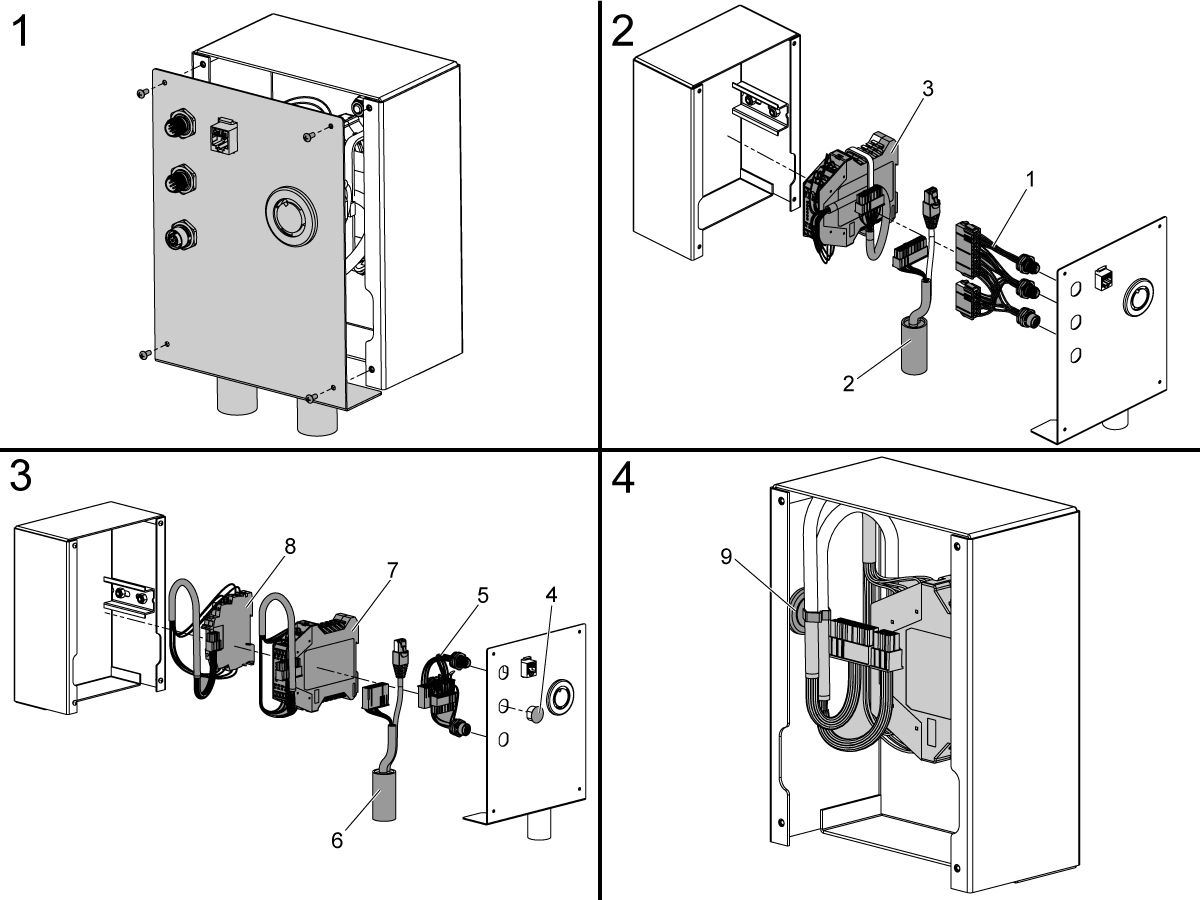
1. 移除接口箱前盖。
2. 从前盖移除电缆33-8540B[1],断开电缆33-8561B[2],从 DIN 轨道移除安全继电器32-8601[3]。
3. 将球型插头 [4] 安装至前盖上的急停位置。安装33-8540C[5]电缆至前盖。安装 33-8562C[6]电缆。将 24V 急停继电器 32-0974[8]安装至 DIN 导轨,然后重新安装安全继电器 32-8601B[7]至 DIN 导轨。根据机器人电气接口接线示意图,将电缆连接至匹配的连接器。
4. 安装磁性电缆夹[9],以固定继电器电缆并重新安装前盖。
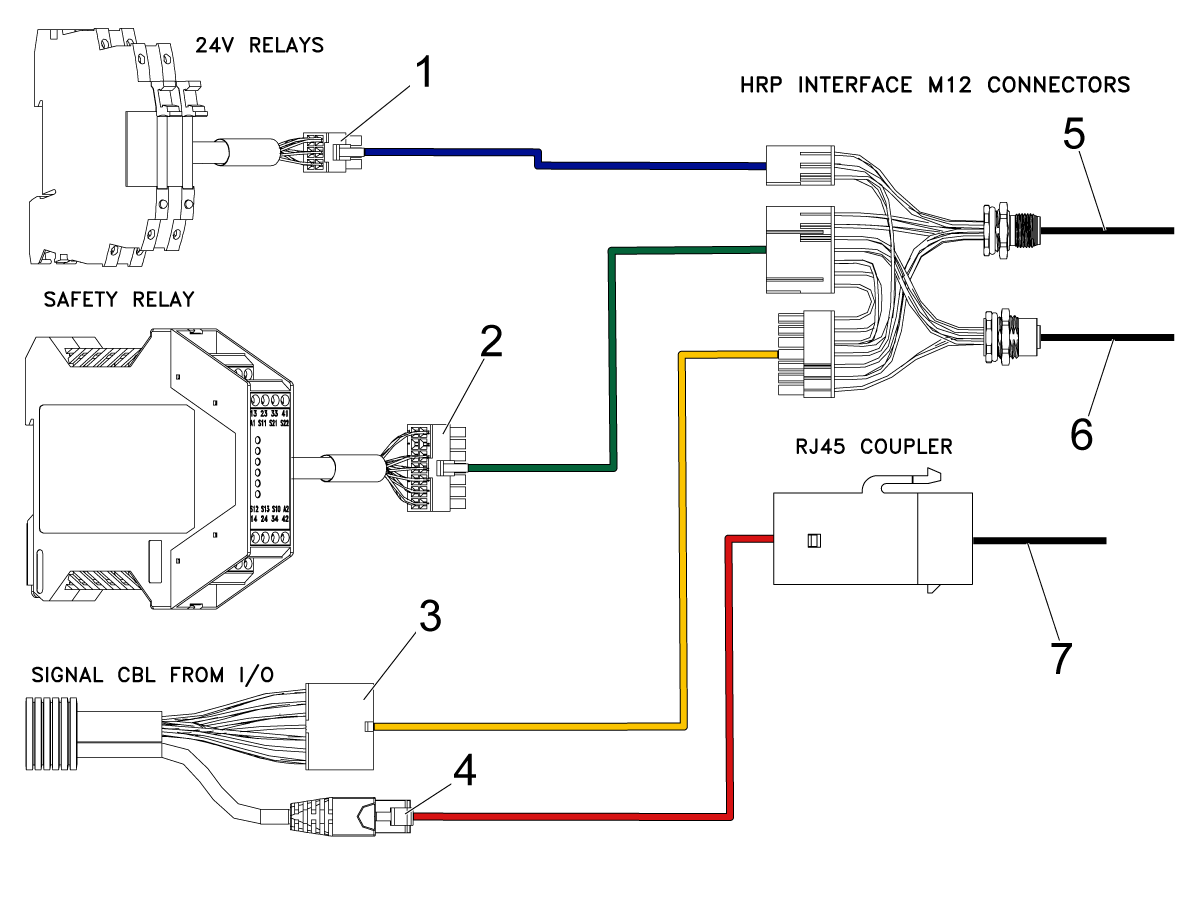
机器人电气接口接线示意图
1. 33-8631 E-STOP 24V RLYS 24VDC RLYS
2. 33-8628A SAFETY RLY SIG SAFETY RLY
3. 33-8561C HRP INTF TO I/O I/O PCB
4. 33-8561C HRP INTF TO I/O I/O PCB RJ-45
5. 机器人信号连接至 33-8590A
6. 连锁 连接至 33-0721
7. RJ-45 连接至 33-8590A
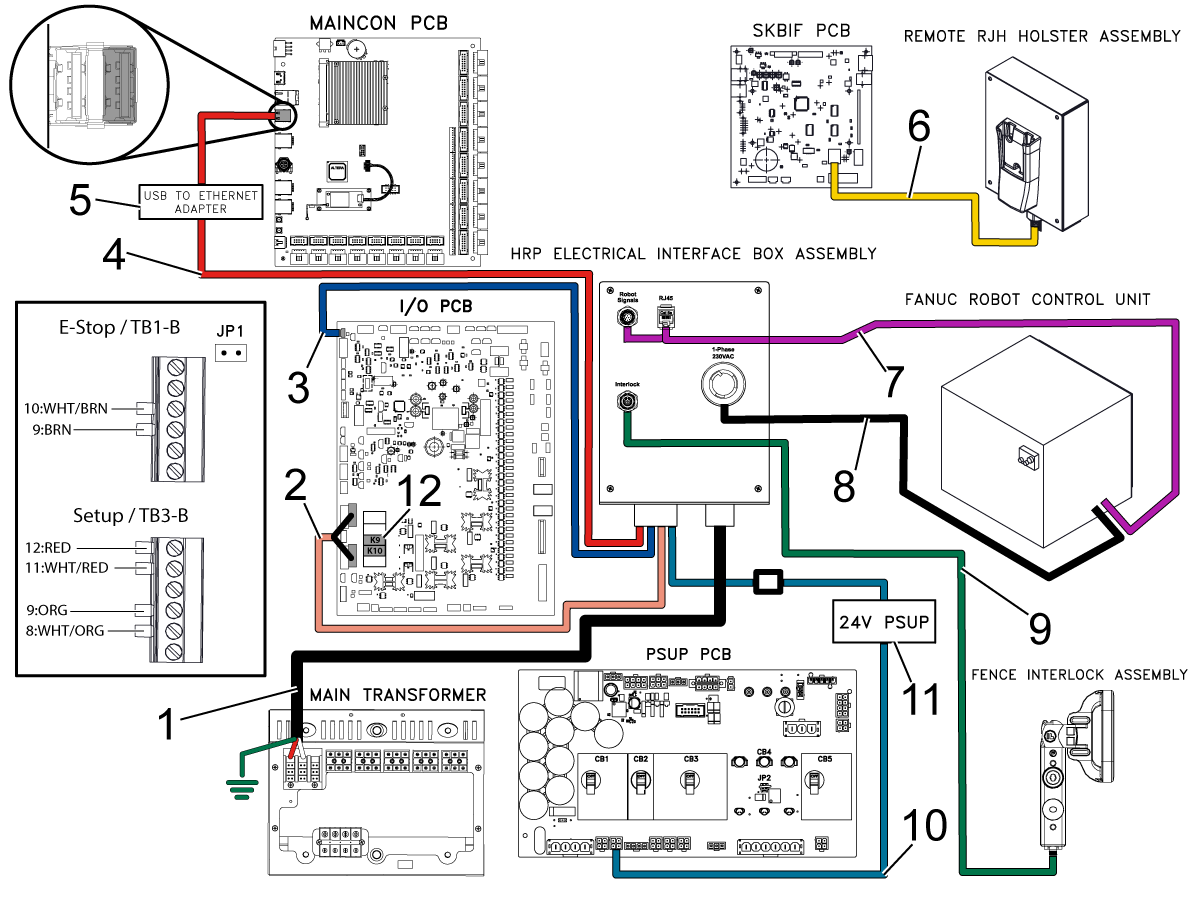
I / O PCB 和 Maincon PCB
电缆[2]P/N 33-8561C 配备多种连接:
注意:如果机床有再生矢量驱动,请从P1 SIO拔出电缆 33-0634 FILTER OV TO IOPCB P1并将其插入连接器FILTEROV FAULT。如果机床没有再生矢量驱动,请勿将任何东西插入连接器FILTER OV FAULT。
SKBIF 至遥控手轮
警告:由于不将跳线置于垂直位置,RJH-XL 上的急停功能被禁用,机床被视为不安全。跳线必须为垂直插入。
机器人电气柜到机器人控制器
机器人供电
围栏联锁
---installation---ad0533/verification-2.png)
加载最新的配置文件以启用 RJH-XL。
将 RJH-XL 从皮套上取下时,远程点动图标 [1] 应在屏幕底部弹出。
然后,按 RJH-XL 上的 [E-STOP] ,并确保屏幕上弹出急停图标 [2],以确保远程急停装置正常工作。
Recently Viewed Items
You Have No Recently Viewed Items Yet

此价格包含运费、出口和进口关税、保险费以及任何在运送至与您(买家)商定的位于法国的某一地点的过程中产生的其他费用。在 Haas 数控产品的交付中不会添加任何其他强制性费用。
随时掌握 HAAS 最新提示和技术……
HAAS TOOLING 接受以下条件:


This site is protected by reCAPTCHA and the Google Privacy Policy and Terms of Service apply.

2800 Sturgis Rd., Oxnard, CA 93030 / Toll Free: 800-331-6746
Phone: 805-278-1800 / Fax: 805-278-2255





