主轴
主轴
 刀库
刀库
 第 4 轴 |第 5 轴
第 4 轴 |第 5 轴
 刀塔和动力刀
刀塔和动力刀
 探测
探测
 切屑和冷却液管理
切屑和冷却液管理
 Haas 控制系统
Haas 控制系统
 产品选项
产品选项
 刀具和夹具
刀具和夹具
 工件夹具
工件夹具
 5 轴解决方案
5 轴解决方案
 自动化
自动化

Your document is ready for download, please click below to download your document.
Download DocumentError processing this document, please try again or 联系我们.
Please wait while your document is being loaded.

Your document is ready for download, please click below to download your document.
Download DocumentError processing this document, please try again or 联系我们.
Please wait while your document is being loaded.
AD0494
版本 B - 2026 年 1 月
此过程将向您展示如何安装 Haas 7 公斤机器人臂套装。
注意:Haas 设计的工作单元包含数控机床设备和机器人,该工作单元已通过 CE 认证评估。通过对此 Haas 设计单元的更改或变量进行评估,其满足适当标准,且可用于用户/集成商。
机器要求:
注意:如果机床配备了“接料机”选件。收集盘会干扰机器人,因此需要将其移除。需要制作定制钣金面板以覆盖和密封开口。
固定/地脚要求
Haas 机器人套装包括以下组件:
注意:上面的零件可能会更改,并且会根据生产日期而有所不同。
Haas 机器人套装将以下组件现场安装至 Haas 机床:
| 零件编号 | 说明 |
| 93-1001031 - HRP 订购参数 | 机器人魔法代码 |
| 93-1000997 - 仅前门自动化安全参数 | 前门机器人安全参数 |
93-1000976 - 安装套件 HRP-1 ST-10/28 NOT CE 或者 93-1000906 - 安装套件 HRP-1 ST-10/15 CE 或者 93-1000907 - 安装套件 HRP-1 ST-20/25/28 CE |
ST-10/15/20/25/28 和 DS-20Y/25Y HRP-1 安装套件 或者 CE ST-10/15 HRP-1 安装套件 或者 CE ST-20/25/28 和 DS-20Y/25Y HRP-1 安装套件 |
以下机器人安全设备之一: 93-1000894 HRP-1 安全围栏 VMC/ST 08-1897 激光区域扫描仪套件 08-1899 多面光幕 HRP 套件 |
机器人安全设备 |
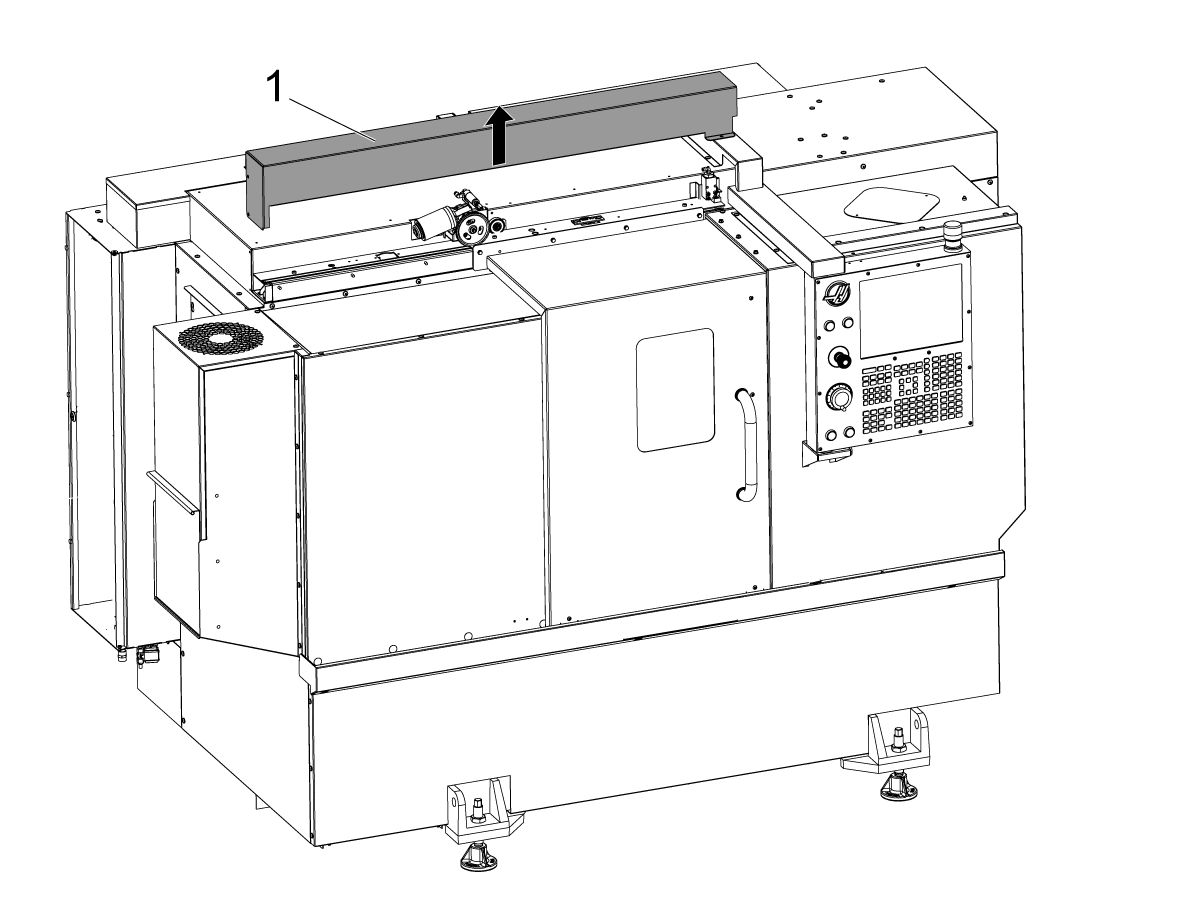
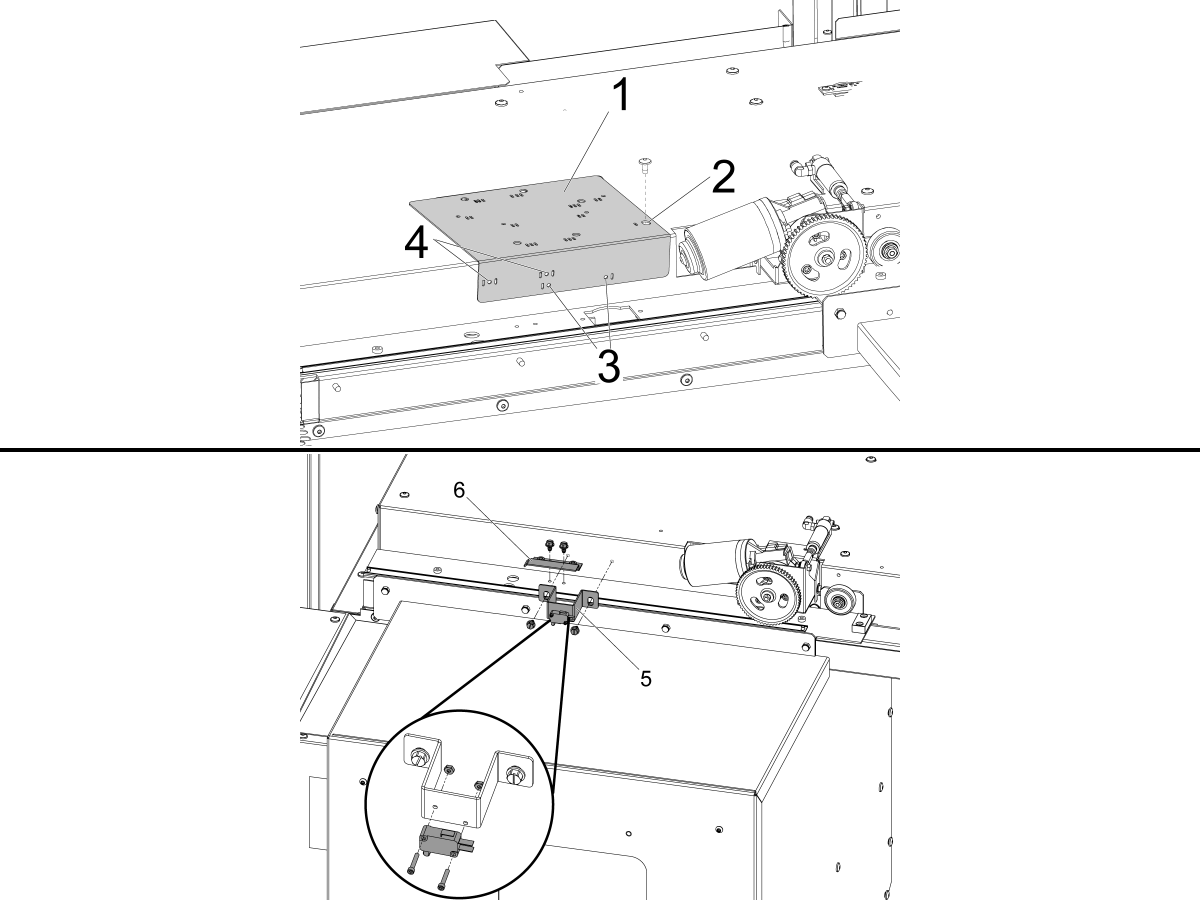
拆下自动门盖 [1]。
ST-20/25 和 DS-20Y/25Y:
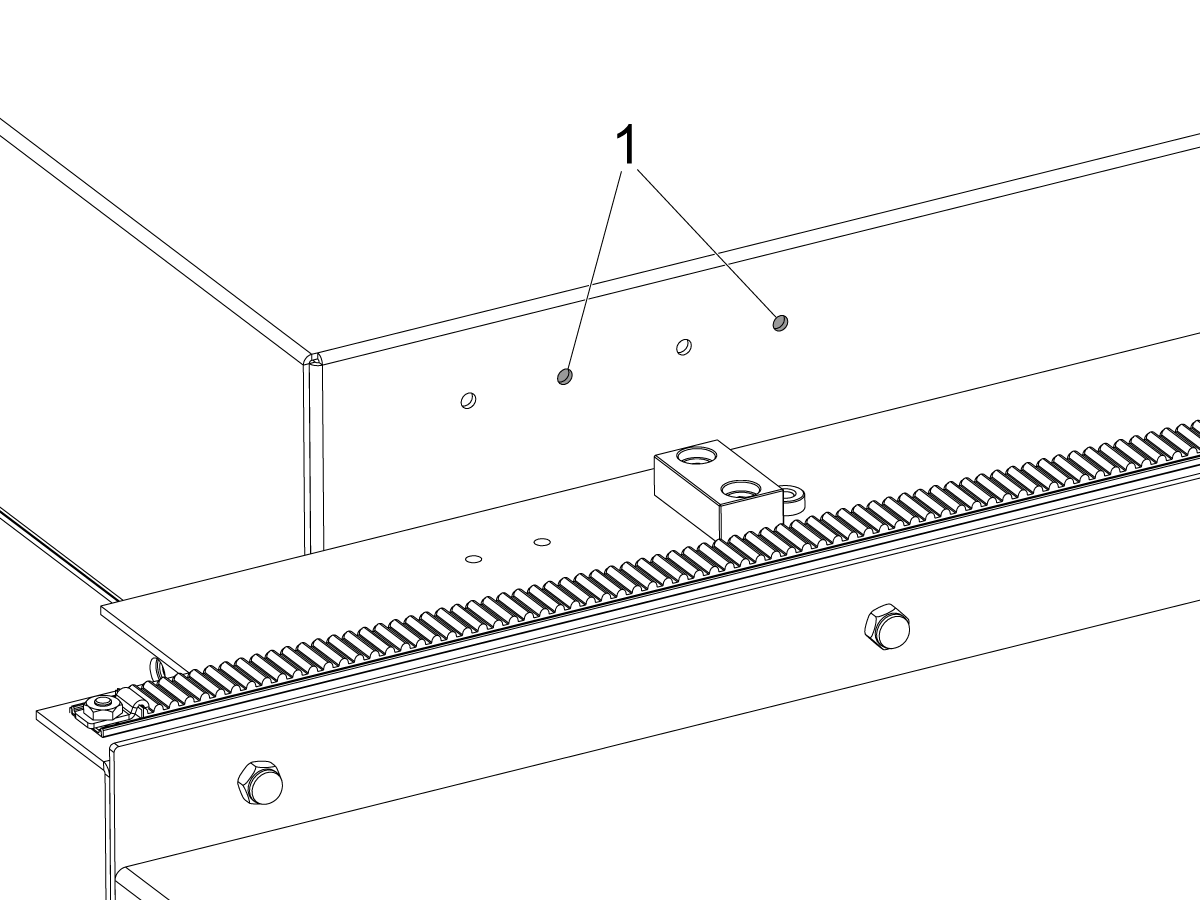
对于顶板带开关支架孔的机床设备。将开关支架安装至 ST-20/25 和 DS-20Y/25Y 右侧的一对孔 [1]内。
注意:钻孔前,检查机床顶板左上角的开关支架孔。
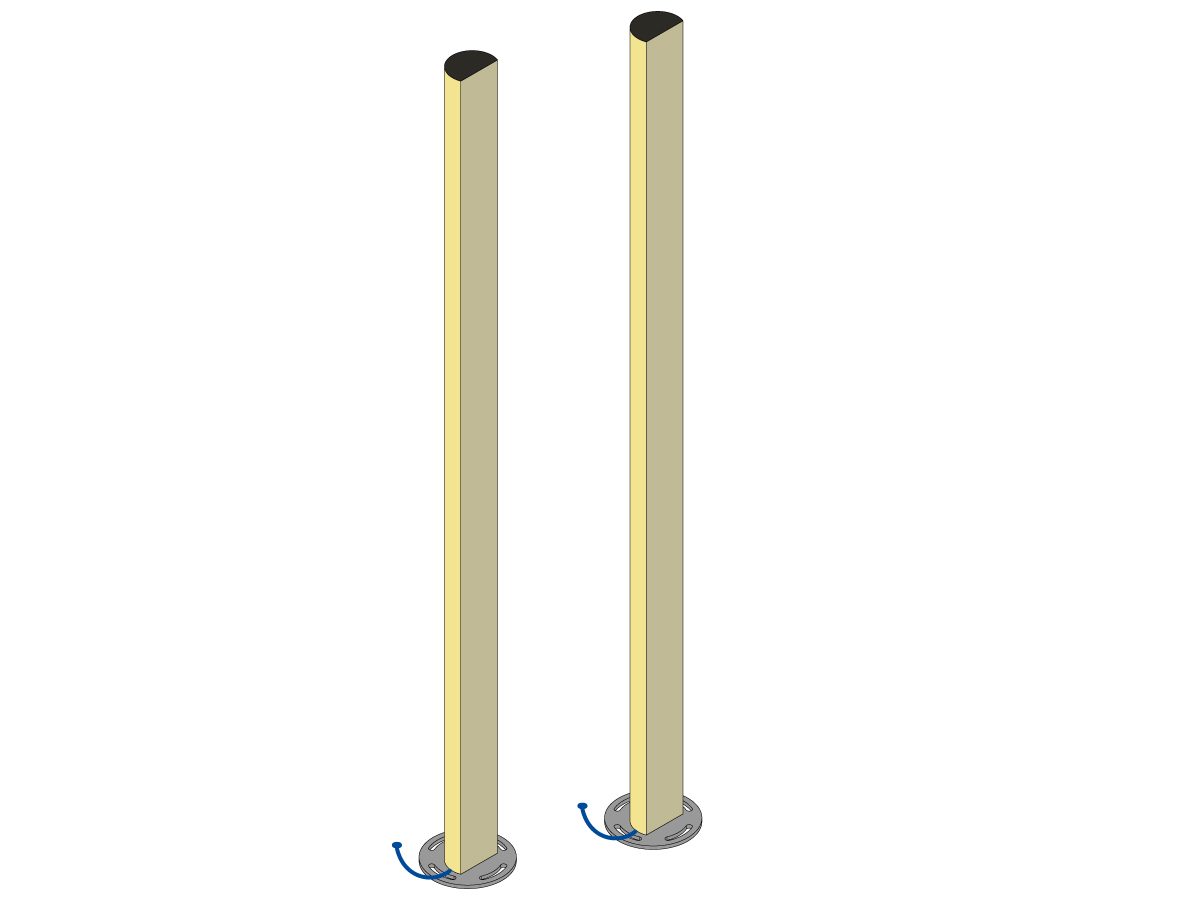
对顶板不带开关支架孔的机床设备。使用提供的钻杆 [1] 钻出 DOOR FULLY OPEN 状态开关。
将标有一个插槽 [2] 的钻杆顶部最右侧的孔与自动门盖安装孔对齐,并将其固定为 BHCS。
ST-10/15:
ST-20/25 和 DS-20Y/25Y:
使用提供的自攻螺钉,安装 DOOR FULLY OPEN 开关组件 [5] 和 DOOR FULLY OPEN 行程标志 [6]。
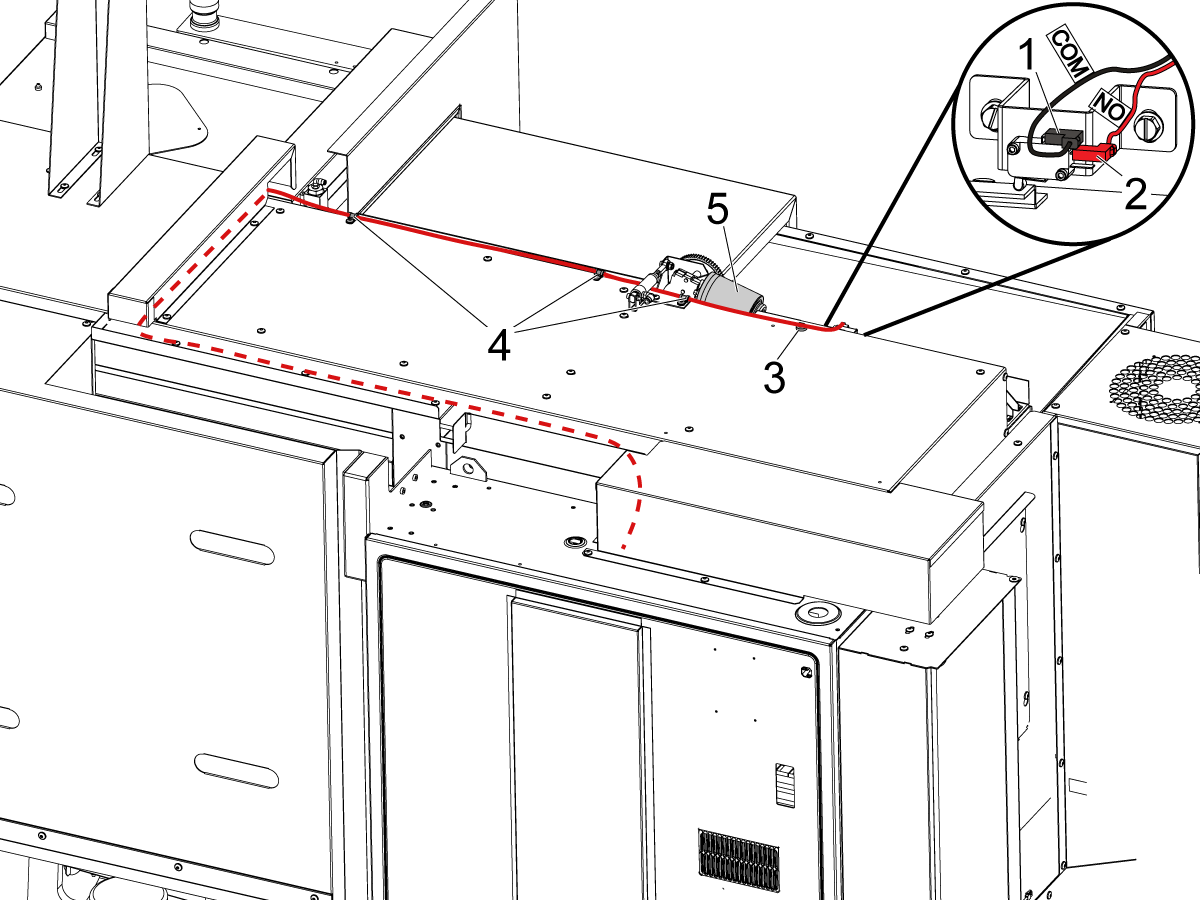
如图所示连接“门全开”开关:
如图所示,将电缆插入控制柜。
注意: 确保安装随附磁夹 [3] 和电缆夹 [4],使电缆远离移动的自动门电机 [5]。
将电缆另一端连接到 SIO P27 RRI Door Open 输入端。
安装电机盖。
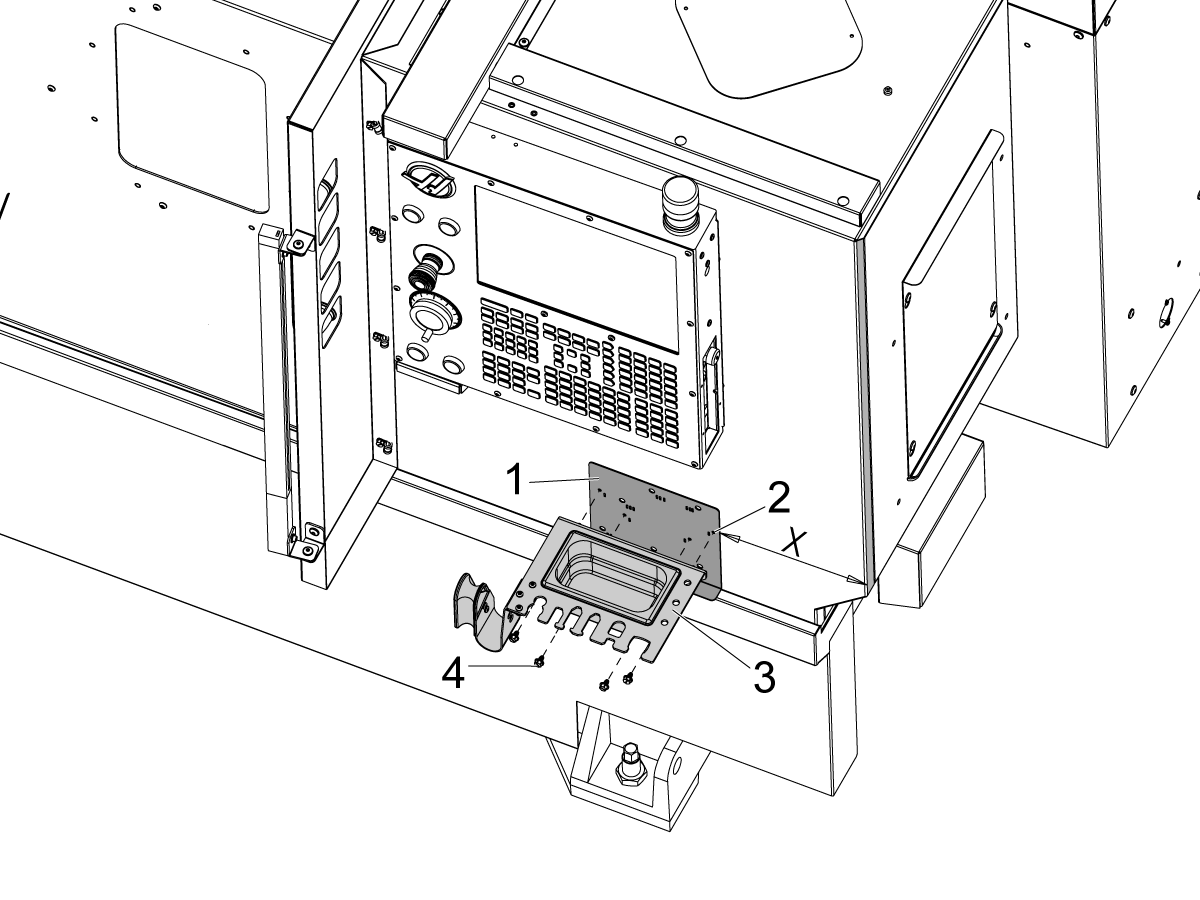
拆下连接到控制器底部的工具托盘支架。
ST-10/15:
ST-20/25 和 DS-20Y/25Y:
通过标有两个插槽的钻导孔 [2] 钻四个 Ø 3/16"(4.7 毫米)安装孔。
使用四个自攻螺钉 [4] 拆下钻杆并将工具托盘 [3] 连接到前面板。
---vertical---installation/2019-10-08_15h56_48.jpg)
注意:弹簧推料机的零件号为:

使用这些信息来起吊/移动 7 公斤机器人套装。
注意: 根据需要将适用的零件移到备用侧以匹配配置。
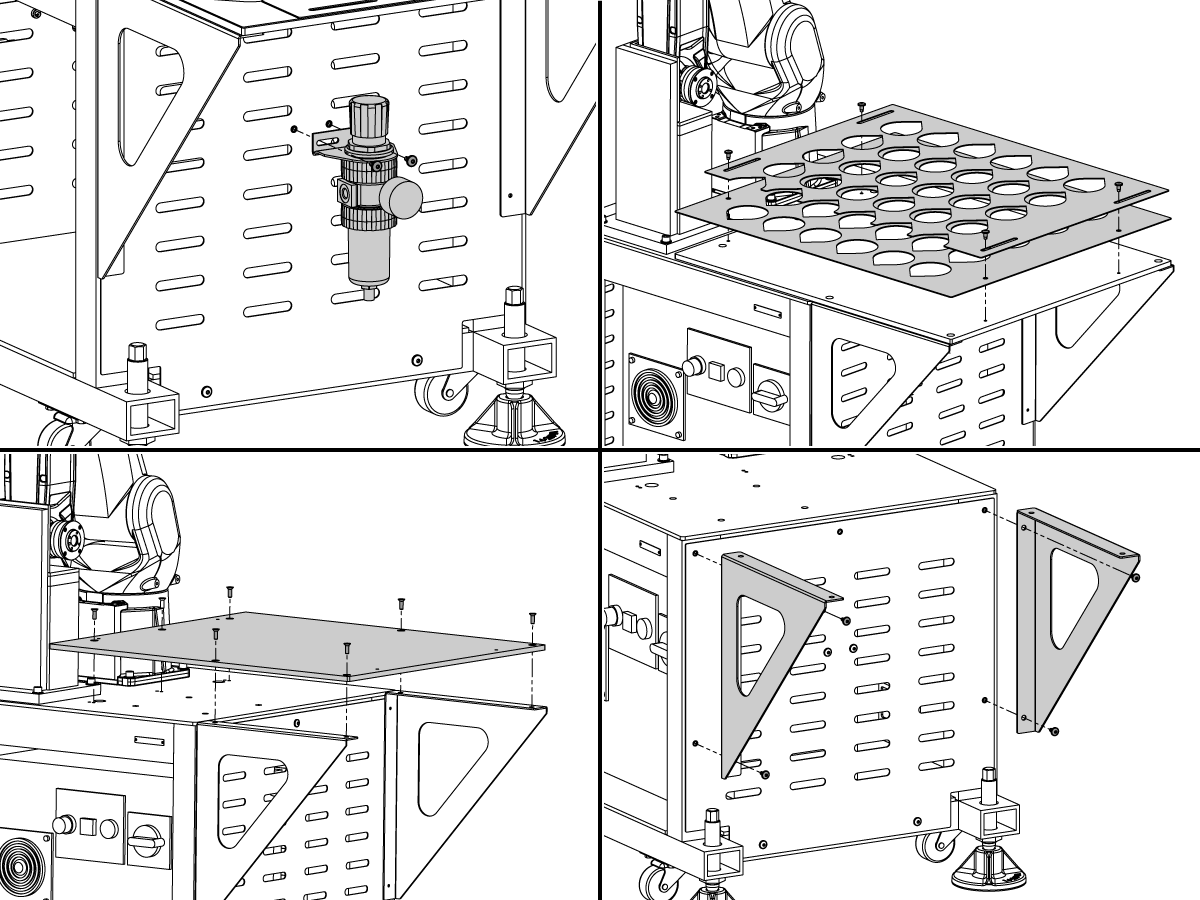
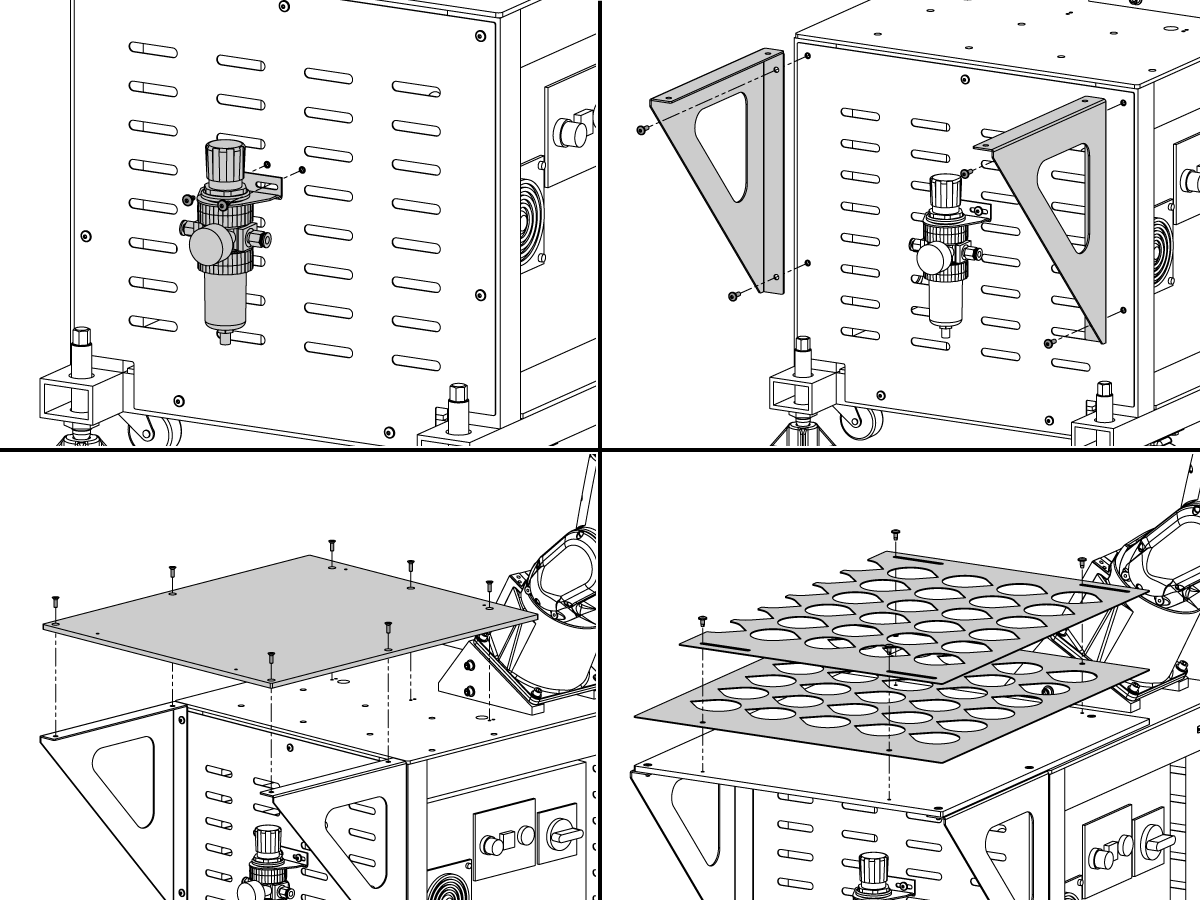
从机器人支架上拆下调节器。
拆下零件模板。
拆下零件模板工作台。
拆下零件工作台加强筋。
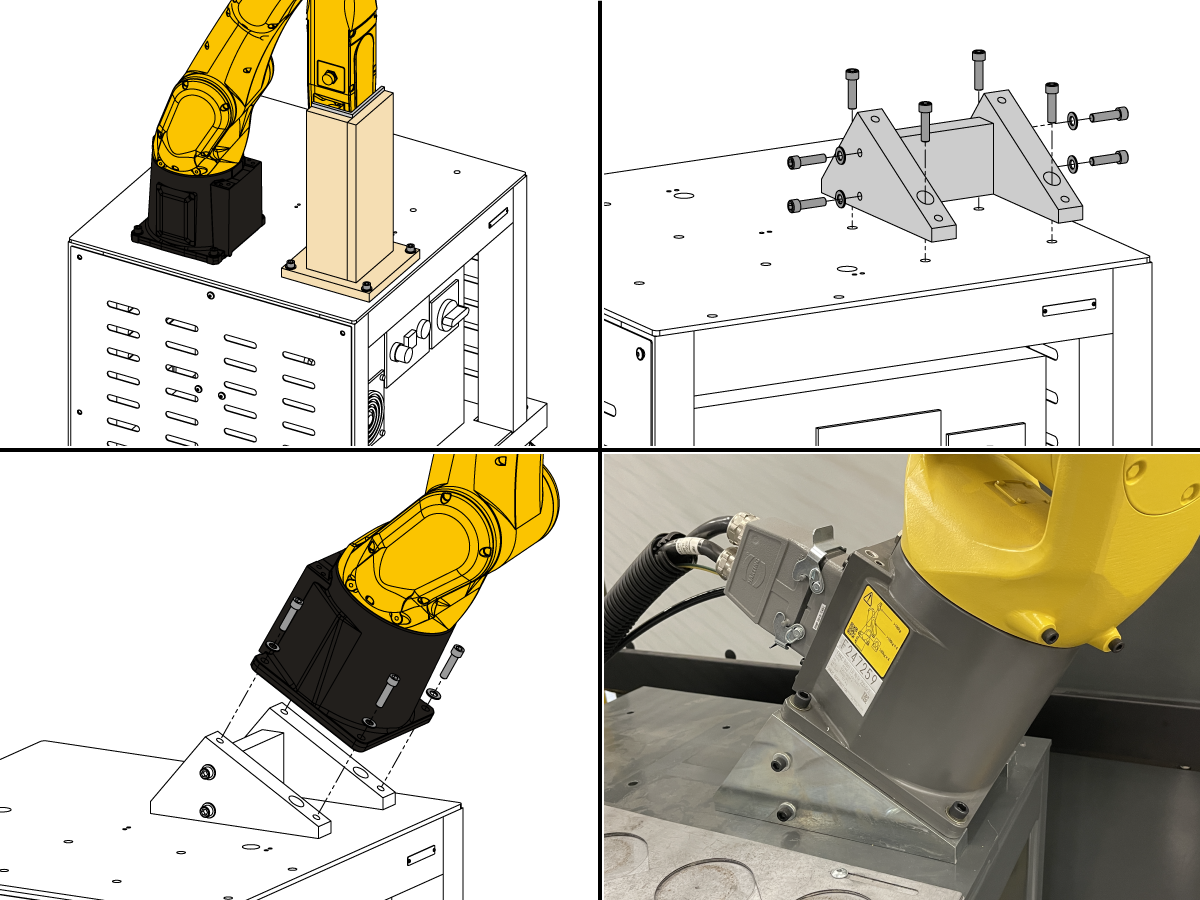
移除机器人运输支架硬件,将其滑离机器人臂。
安装机器人支架。
从运输位置卸下机器人,将电缆连接器连接到支架背面,将机器人安装到机器人支架上。
注意:请勿重复使用运输硬件。
机器人安装完毕后,请卸下机器人升降支架和硬件。
注意: 根据需要将适用的零件移到备用侧以匹配配置。
将调节器安装到机器人支架上。
安装零件工作台加强筋。
安装零件模板工作台。
安装零件模板。
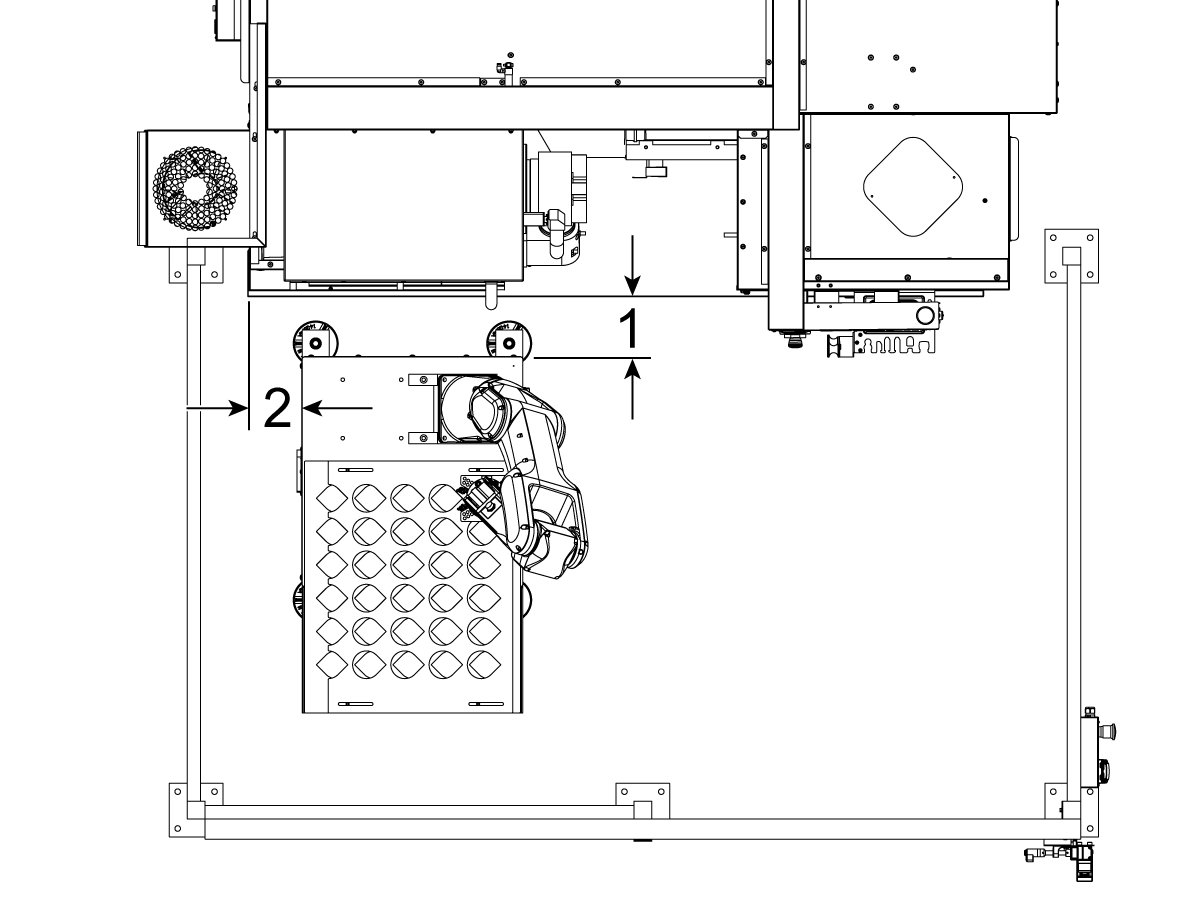
测量机床裙边到机器人工作台侧面板的尺寸。
注意: 以下尺寸为推荐距离。位置可能因用户应用场合而异。
使用下面的尺寸来定位工作台。
安装调平垫并抬高调平螺钉,直至车轮脱离地面。
使用气泡水平仪调整工作台水平度。
| 尺寸编号 | ST-10/15 | ST-20/25 |
| 1(工作台到机床正面) | 5.0 英寸(127.0 毫米) | 10.5 英寸(266.7 毫米) |
| 2(工作台到机床左侧) | 9.0 英寸(228.6 毫米) | 10.0 英寸(254.0 毫米) |
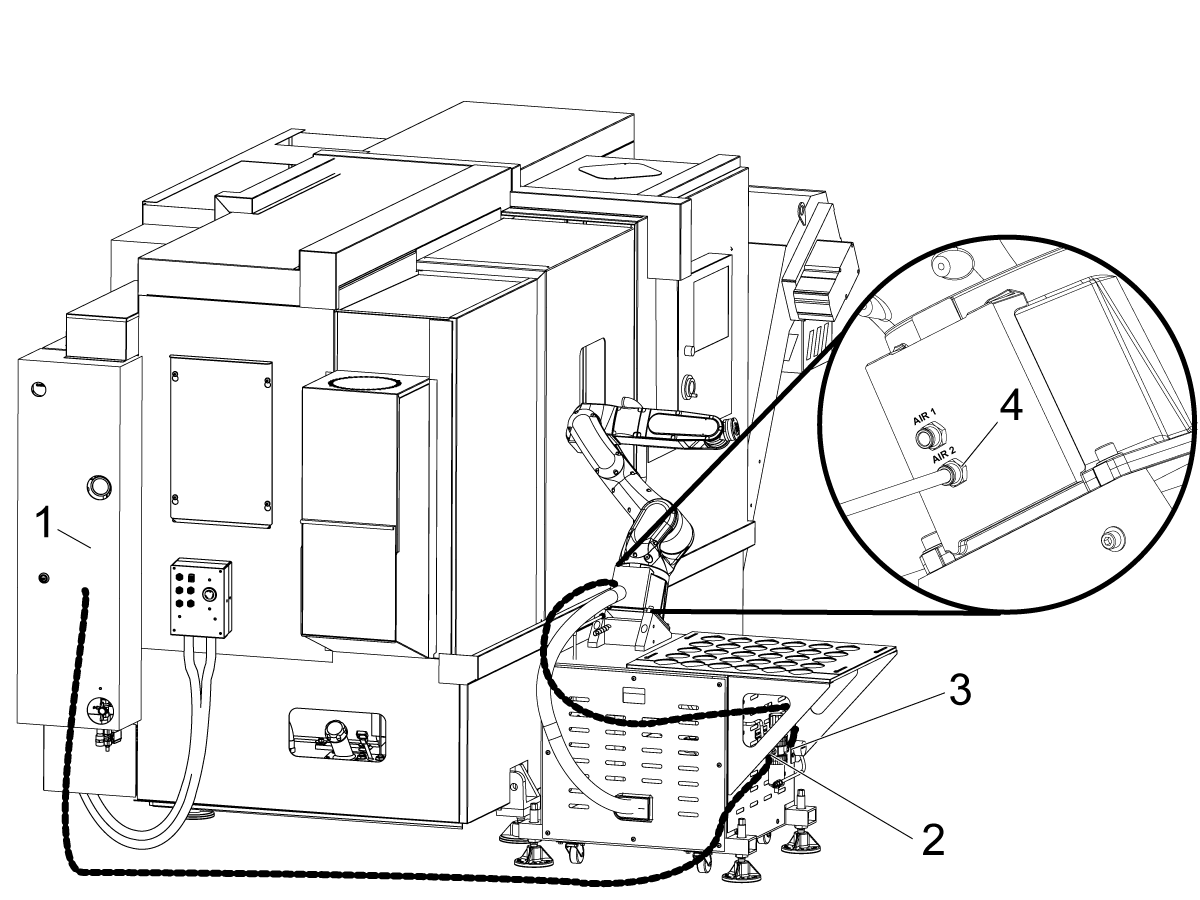
关闭机床供气。
在 CALM 机柜[1]内,从其中一个 CALM 歧管端口卸下 NPT 插头
将空气管线从调压器 [2] 的左侧连接到 CALM 机柜,然后安装推连接头。
从调节器 [3] 右侧将空气管道布线至机器人Air 2 端口 [4] ,然后安装推连接头。
打开机床供气。
将调节器设置为应用所需气压。 压力越高,夹紧力越大。以下是 HRP-1 单夹持器和双夹持器的气压范围。

安装 7 公斤 HRP 抽屉式小车。请按以下程序安装。
危险:使用数控设备所需的电气服务非常危险,可能会导致严重伤害或死亡。
在将电线连接到数控设备之前:
如果您不确定如何安全地断开电源或执行 LOTO 程序:
如果不遵守这些预防措施,可能会导致触电、设备损坏或致命伤害。
危险:在控制柜内开始任何工作之前,请确认 320V 电源/矢量驱动的高压指示灯已熄灭至少五 (5) 分钟。这段等待时间可确保剩余电压消散并降低触电风险。
某些服务程序涉及高风险电气部件,可能会造成严重伤害或致命危险。技术人员不得尝试执行任何程序,除非已完全了解涉及的步骤和相关风险。
如果对程序有任何疑问,请联系 Haas 专卖店 (HFO) 以安排符合资质的维修技术人员。

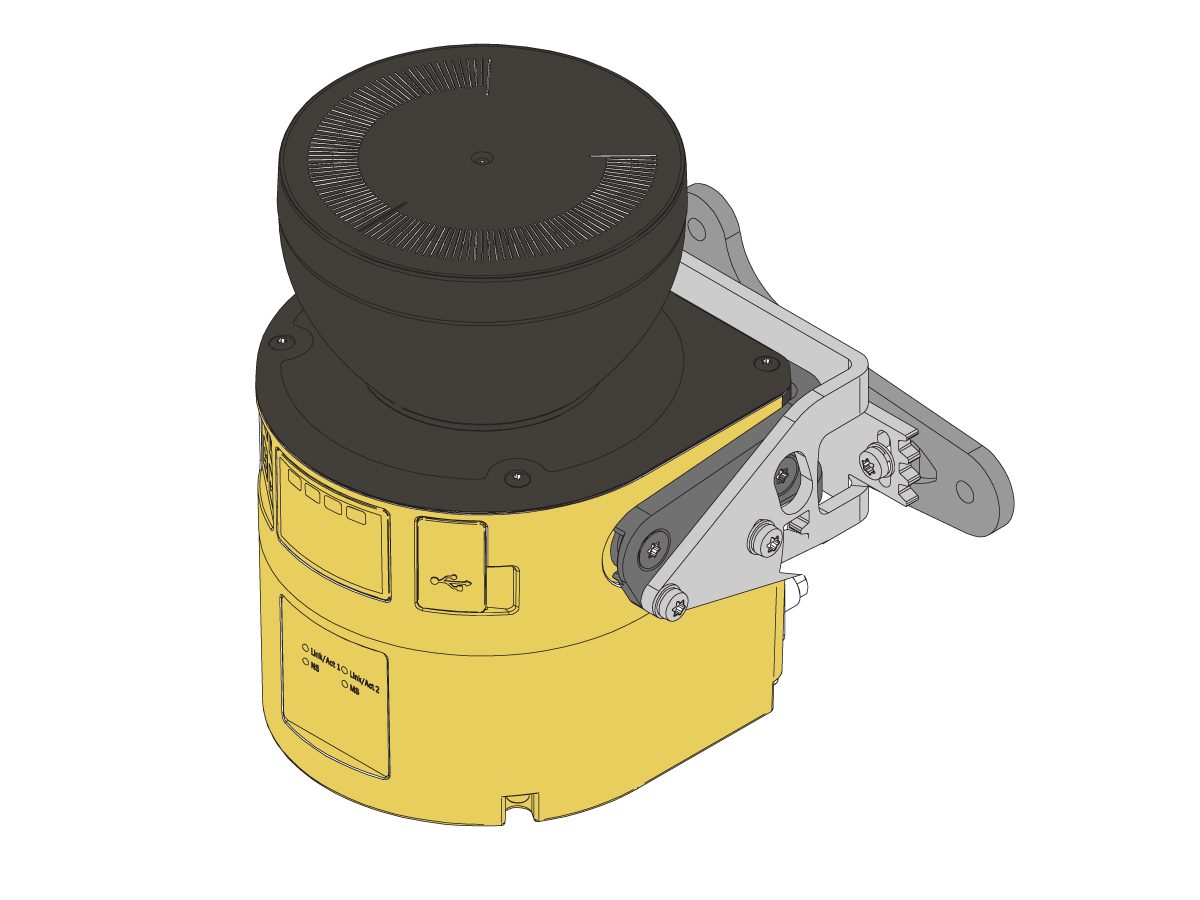
ST 机器人接口安装位置
机器人电气接口盒具有磁性底座,可固定到机床钣金上。
如图所示安装机器人电气接口盒[1]。
将机器人接口电缆[2]穿过电气柜底部。
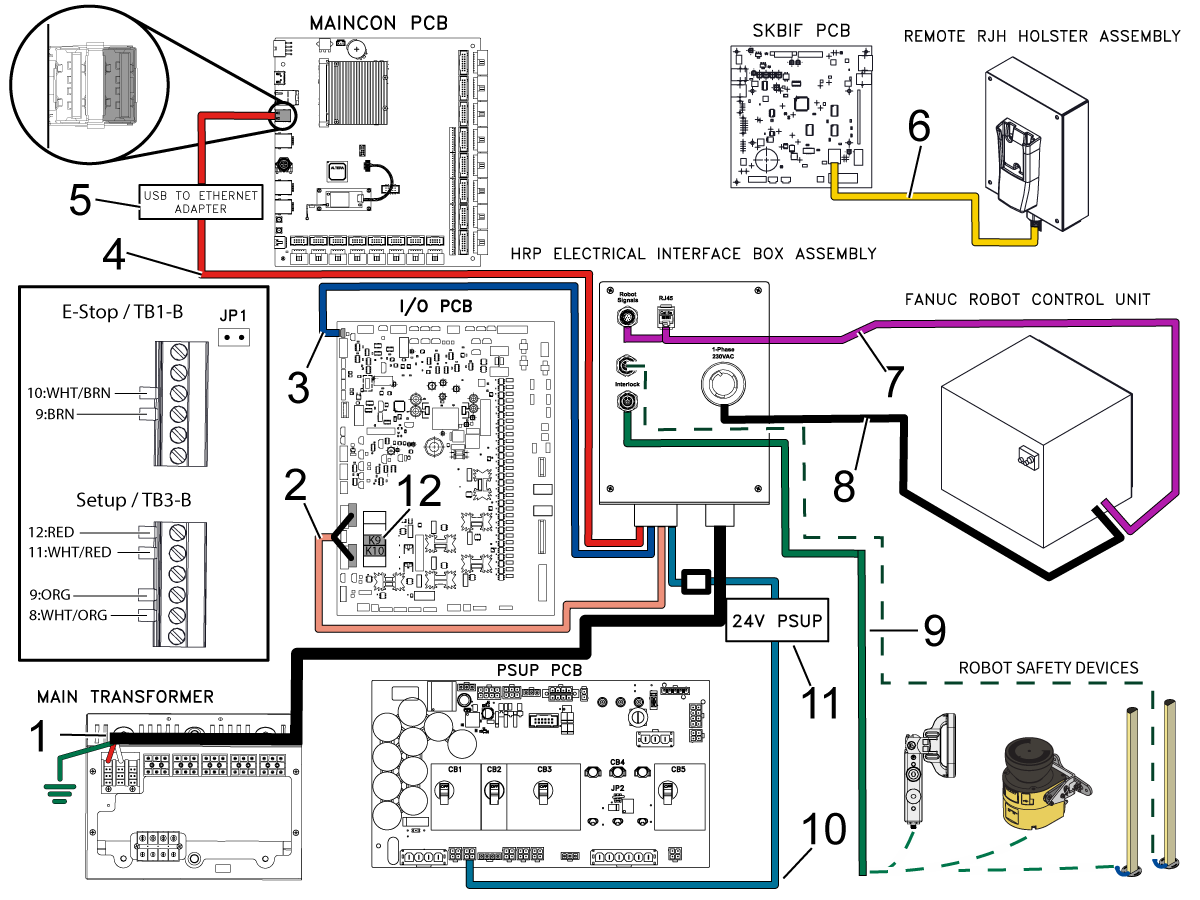
执行以下步骤,以将机器人重新连接至 Haas 机床。
主变压器
注意:某些电缆可能需要重新排列或加倍到一个端口中。
I / O PCB 和 Maincon PCB
电缆 P/N 33-8561C 配备多个连接:
注意: 如果机床具有 再生矢量驱动,请从 P1 SIO 上拔下电缆 33-0634 FILTER OV TO IOPCB P1 ,并将其插入连接器 FILTER OV FAULT。如果机床没有再生矢量驱动,请勿将任何东西插入连接器 FILTER OV FAULT。
SKBIF 至遥控手轮
警告: 由于不将跳线置于垂直位置,RJH-XL 上的急停功能被禁用,机床被视为不安全。跳线必须为垂直插入。
机器人电气柜到机器人控制器
重要须知: 连接机器人控制信号电缆 [7] 时,请确保将 M12 连接器母槽与 M12 连接器公键对齐,以防止任何可能导致引脚损坏的错位。
机器人供电
机器人安全设备
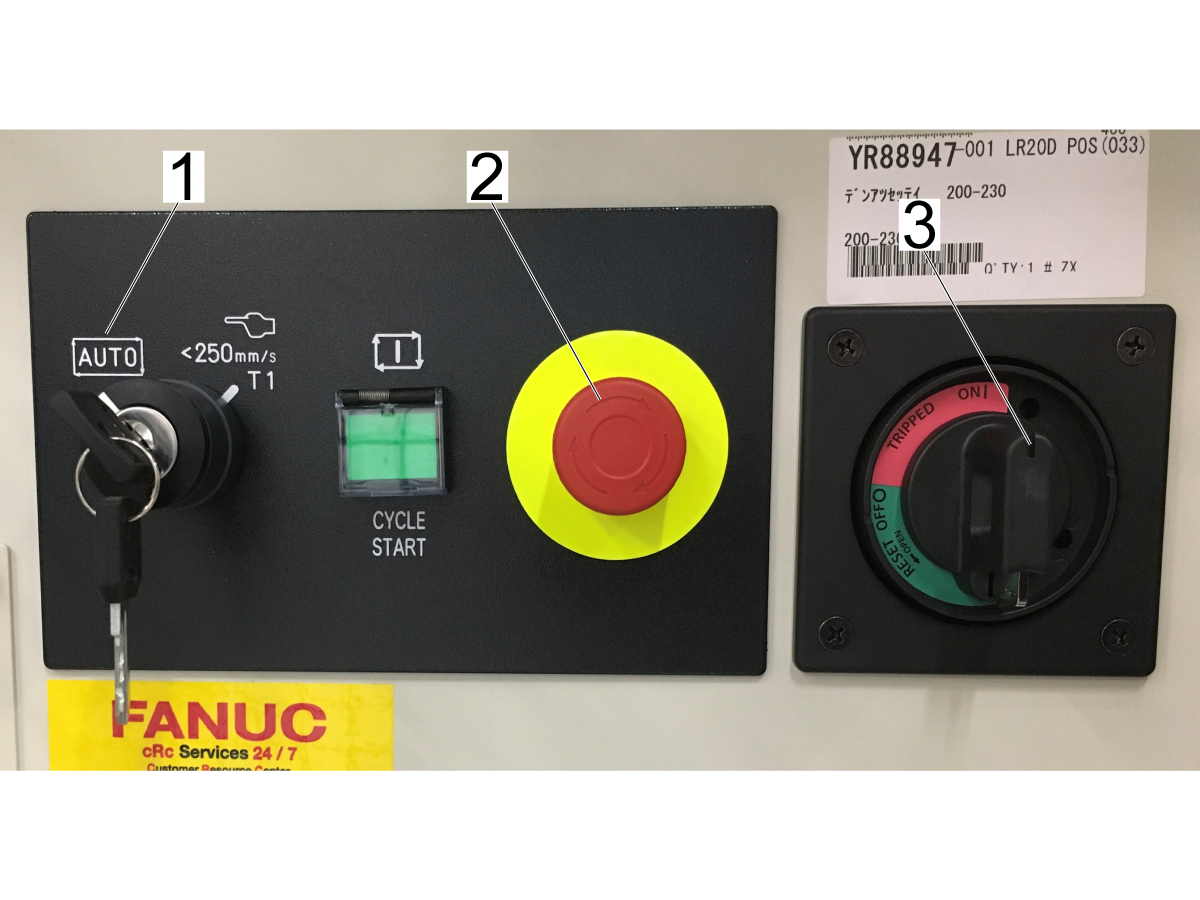
找到控制器操作面板上的模式开关。使用之前步骤中获取的钥匙,切换到“自动模式”[1]。
确保 [E-STOP] 未触及按钮[2]。
顺时针旋转断路器至“开”[3],打开机器人控制箱。

打开 Haas 数控设备。
将所有轴归零。
插入 USB 服务密钥。 转至服务模式.
转至 参数> 出厂 选项卡。 更改如下:
注意: 软件版机器 100.20.000.1010或更高版本需更改以下参数:
按 SETTING(设置)。
设置为:

按 [CURRENT COMMANDS]。
前往 设备)>Robot(机器人)>Jogging(点动) 选项卡,更改以下选项:
转到 Set up(设置) 选项卡。 更改以下内容:

按 [CURRENT COMMANDS]。
转到 设备>机器人>设置选项卡 [1]。
按 [E-Stop]。
按 [F1] 连接机器人[2]。
首次将机器人连接至机床设备时,将弹出“机器人激活”窗口。此弹出窗口显示门户网站上机床的软件版本 [3]、机器人的 MAC 地址 [4] 以及用于机床时间延长的机床生成的代码 [5]。
要激活机器人,请输入 F 编号 [6] 和解锁代码 [7]。
F 号位于控制面板门或机器手臂上的机器人 ID 标签上。
在 Haas 业务中心完成 机器人安装 后,将生成解锁代码。
注意: 在机器人激活之前,需要激活机床。按照 机床激活/时间延长 - NGC 程序操作。
服务激活。在“维修”模式下,按 [INSERT] 以连接机器人。循环供电后将禁用此功能。
注意:此步骤只能由 Haas 专卖店服务技术人员完成。
注意:控制箱上的绿色按钮将会亮起。
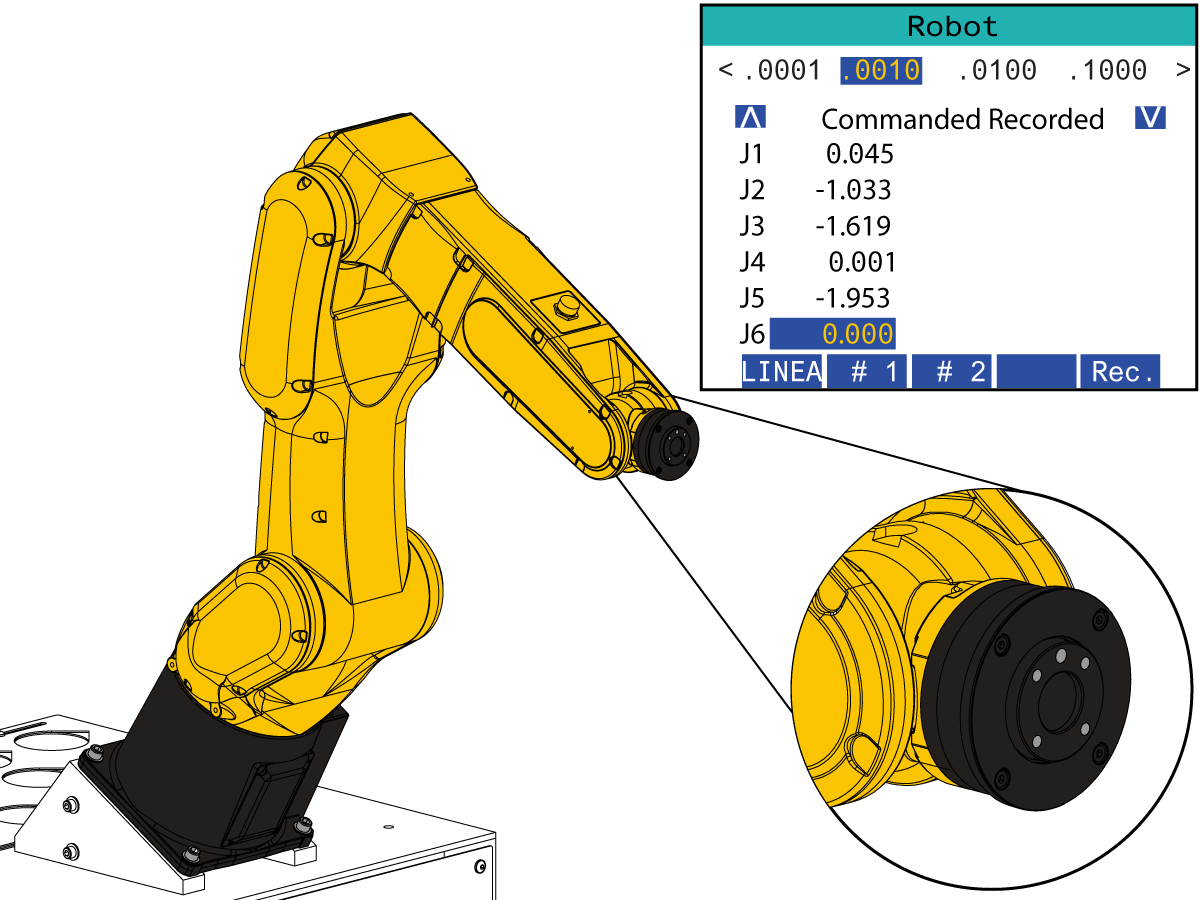
按[HANDLE JOG]按钮。
请按 [CURRENT COMMANDS] 前往 Devices(设备) > Robot(机器人) >Jogging (跑步) 选项卡。
注意: 当 F2 按钮 RJH 按下时,处于设置模式的机器人只能用手柄点动。请参阅下面的“设置/运行模式”部分。
在“遥控手轮”上,按“联合”按钮以进入“联合坐标”。
将机器人移动到可接近的位置,以安装夹持器。
将 J6 点动至 0.0000 位置。定位孔应位于顶部中央位置。
注意: 按 [Emergency Stop] 然后操作机器人。
注意:通过转动空气/润滑机柜内的阀门关闭机床设备,然后拉动泄压阀以释放系统内空气。
本节有两个版本的双动式夹持器,两者遵循相同的安装过程。
定位孔应位于顶部中央位置。
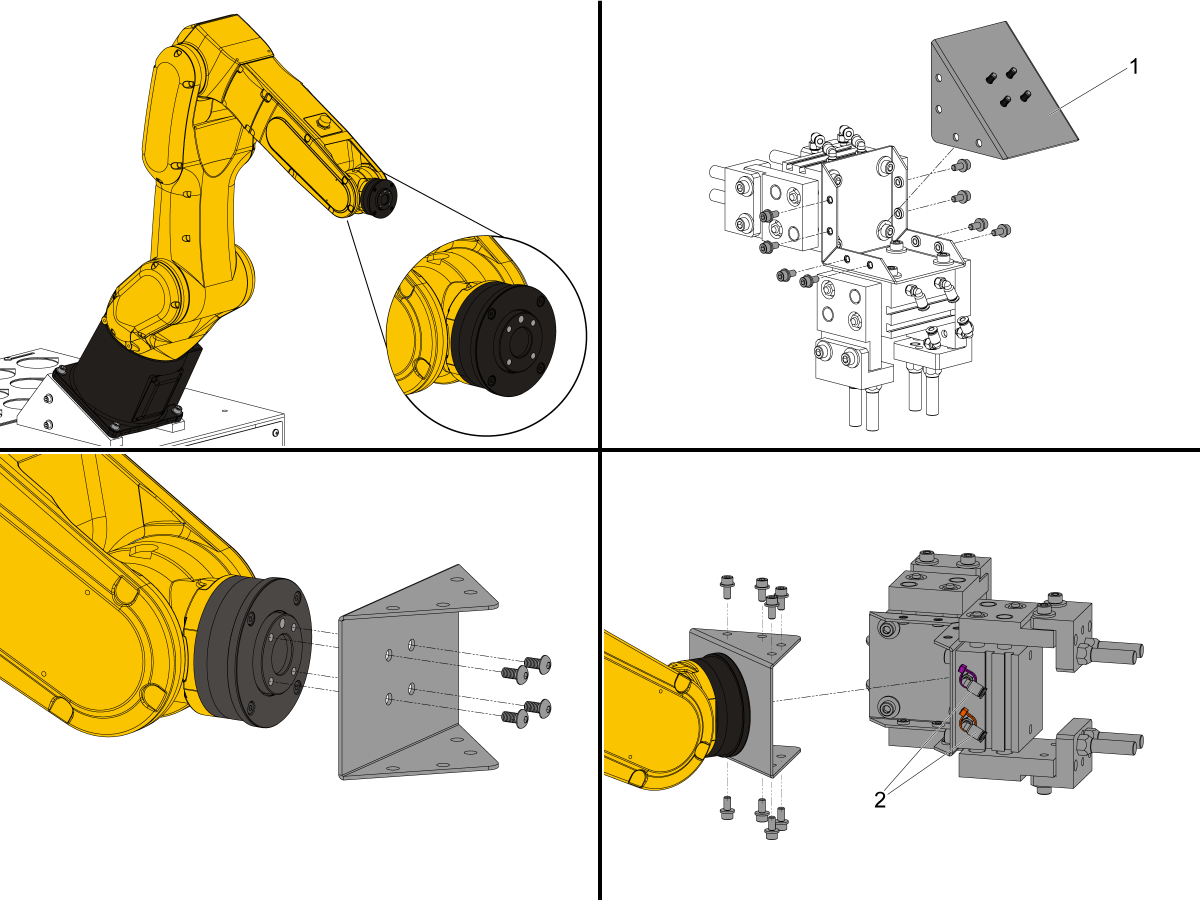
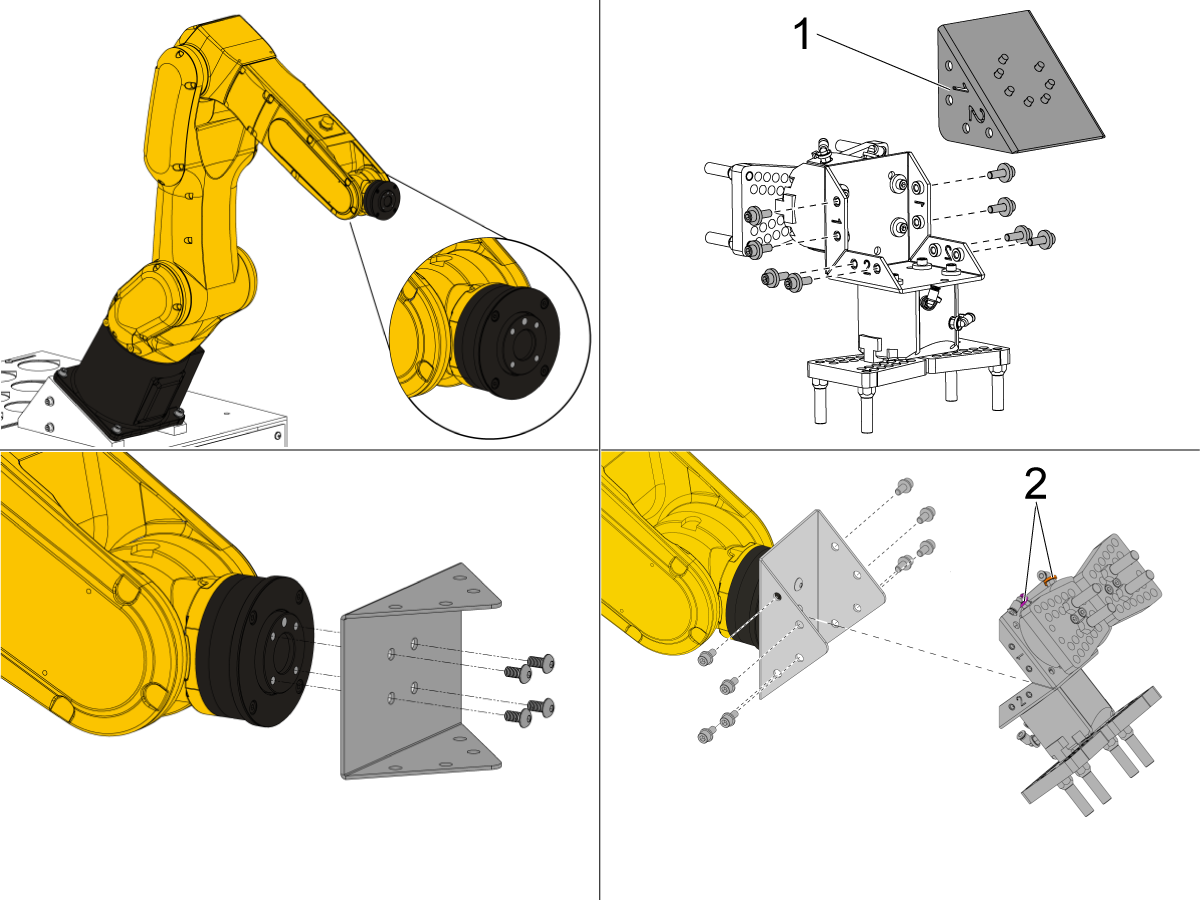
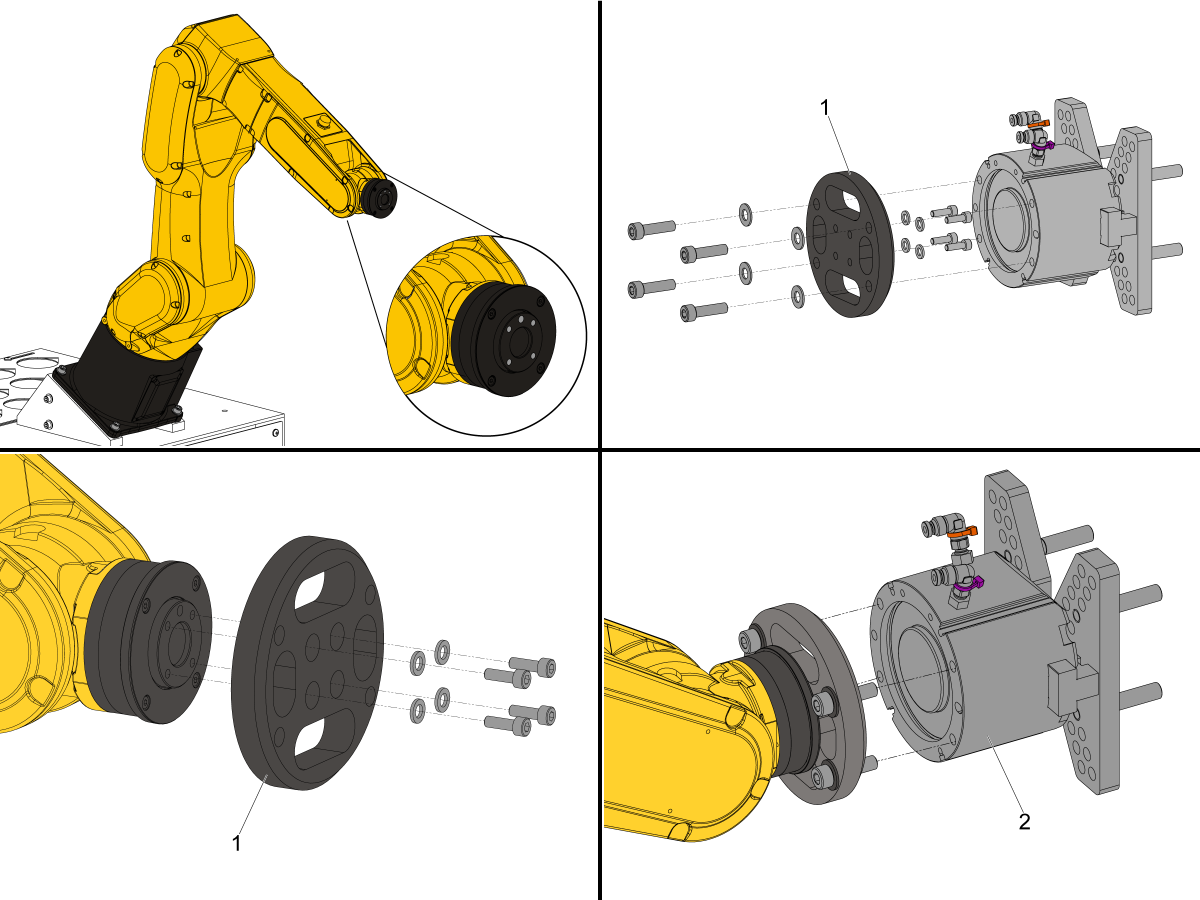
如果您配备双向夹持器,请将夹持器适配器[1]从夹持器总成中移除,以将其安装至机器臂端。
将适配器安装至机器臂端。
将夹持器总成安装至夹持器适配器,夹持器 1 朝上。夹持器 1 配件应有橙色和紫色拉链[2]。
定位孔应位于顶部中央位置。
如果您配备了单动式夹持器,请将夹持器适配板[1]从夹持器总成中移除,以将其安装至机器臂端。
将适配板[1]安装至机器臂端,使大型刀套在上部和底部。
将夹持器总成安装至夹持器适配板。
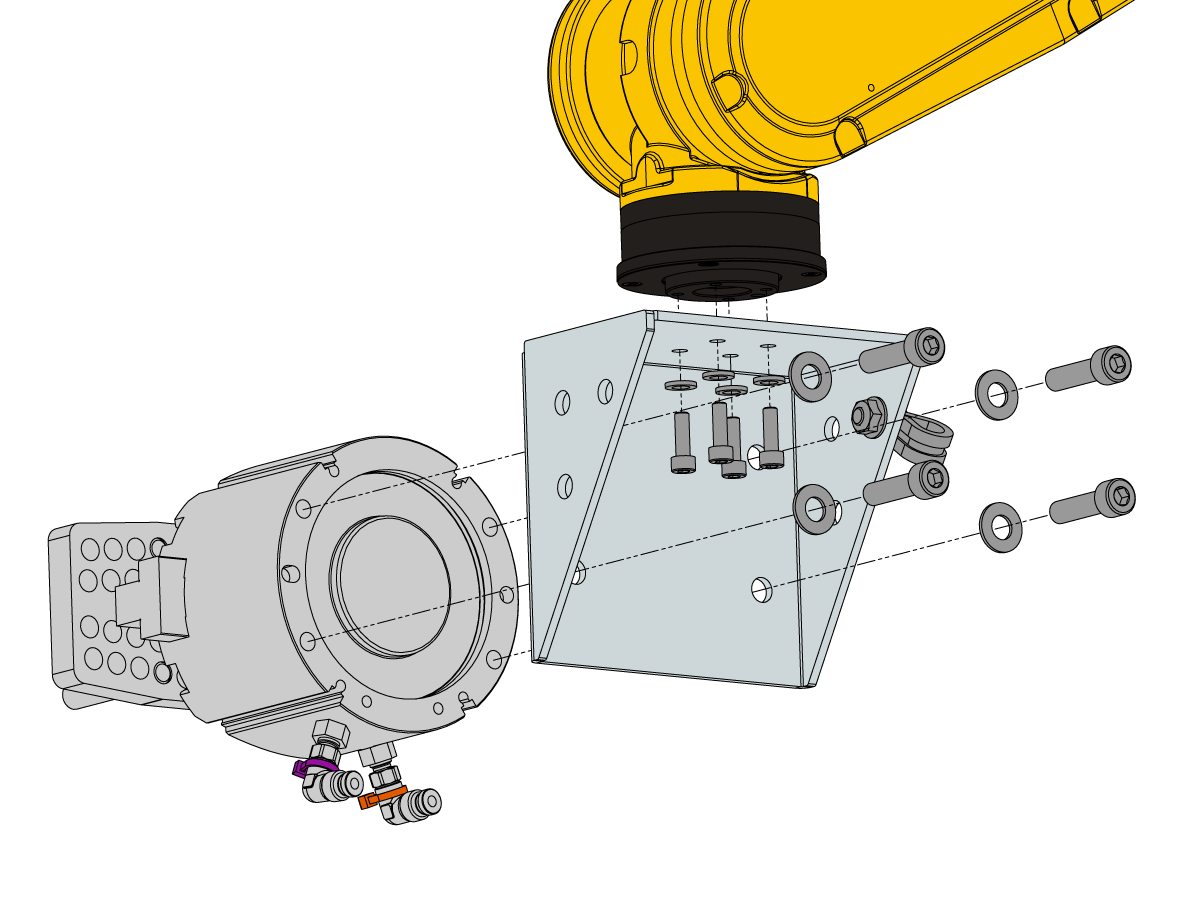
将角型适配器支架安装至机器人臂端。
将夹持器组件安装至夹持器角型适配器板。

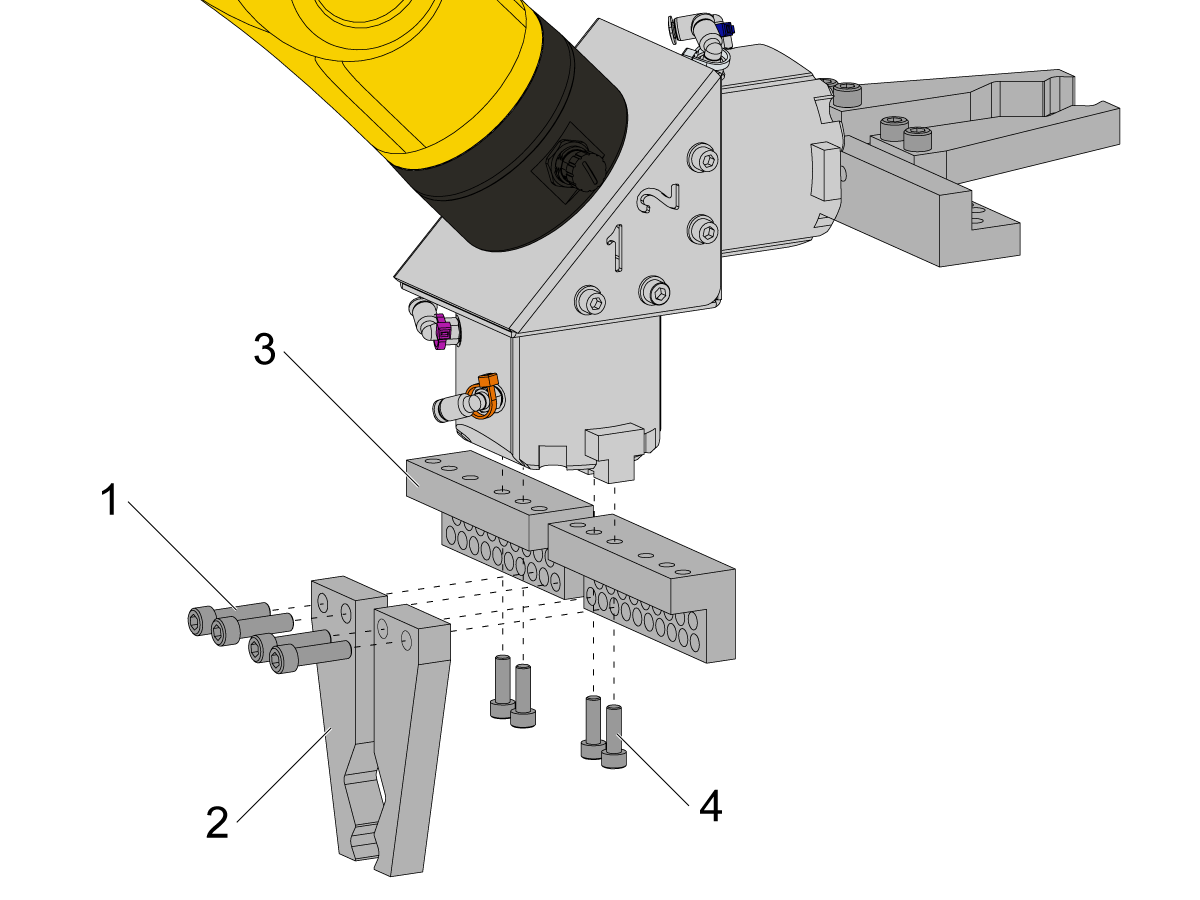
要安装棒料夹持器机械手,请从夹持器主体上移除弹头式夹持器板。
通过以下硬件安装棒料夹持器螺栓板 [3]:8 x SHCS M6 [4]
使用以下硬件安装棒料夹持器机械手 [2]:8 x SHCS 1/4-20 [1]
将夹持器配件安装至机器臂。
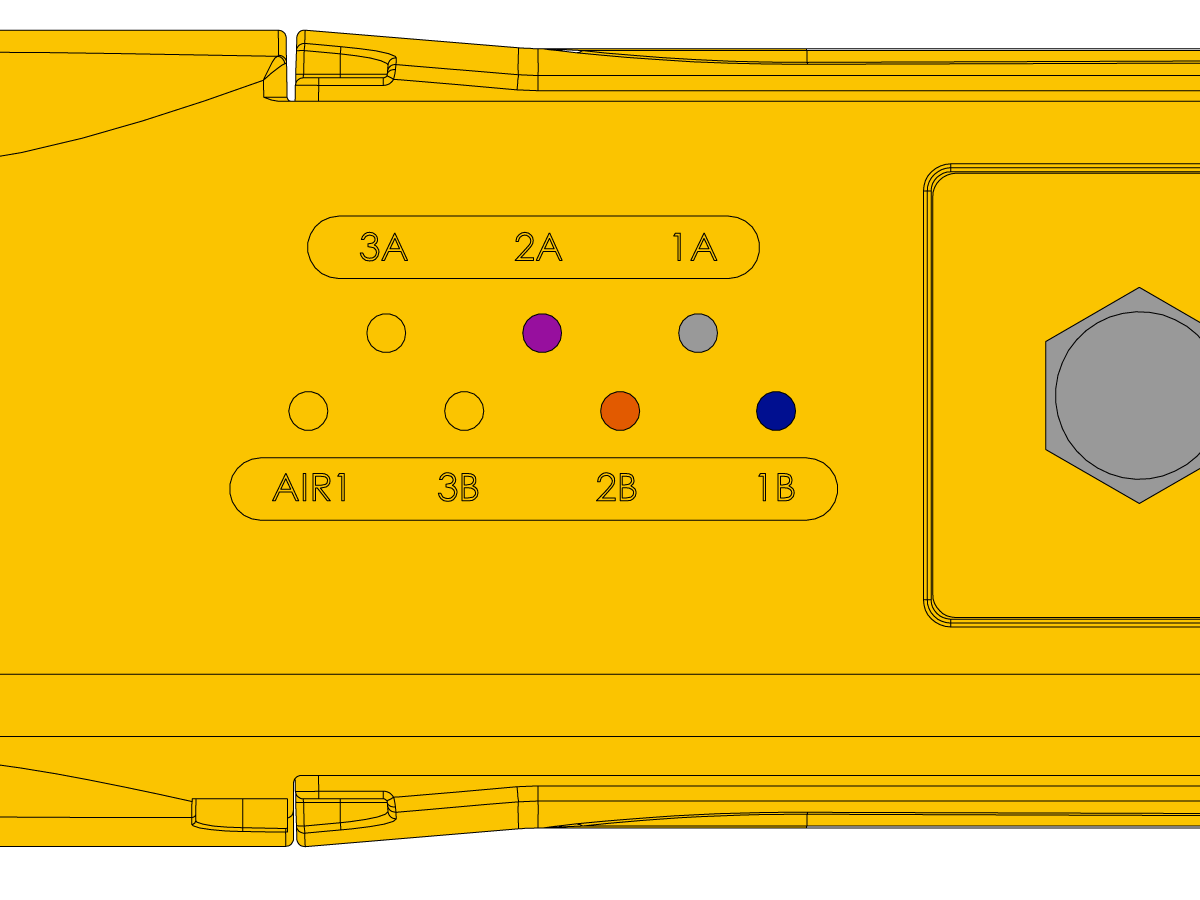
紫色→2A (打开夹持器 1)
橙子 →2B (关闭夹持器 1)
灰色 →1A (打开夹持器 2)
蓝色 →1B (关闭夹持器 2)
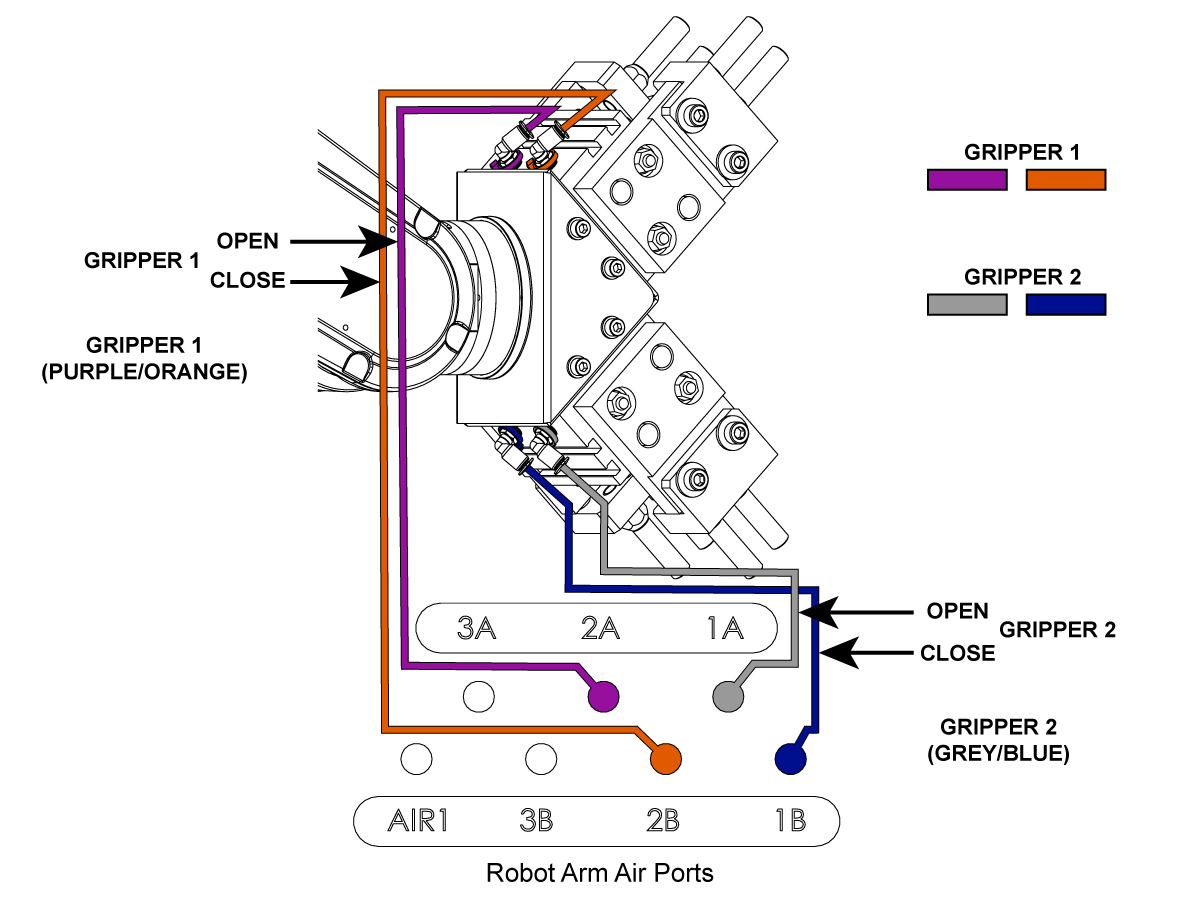
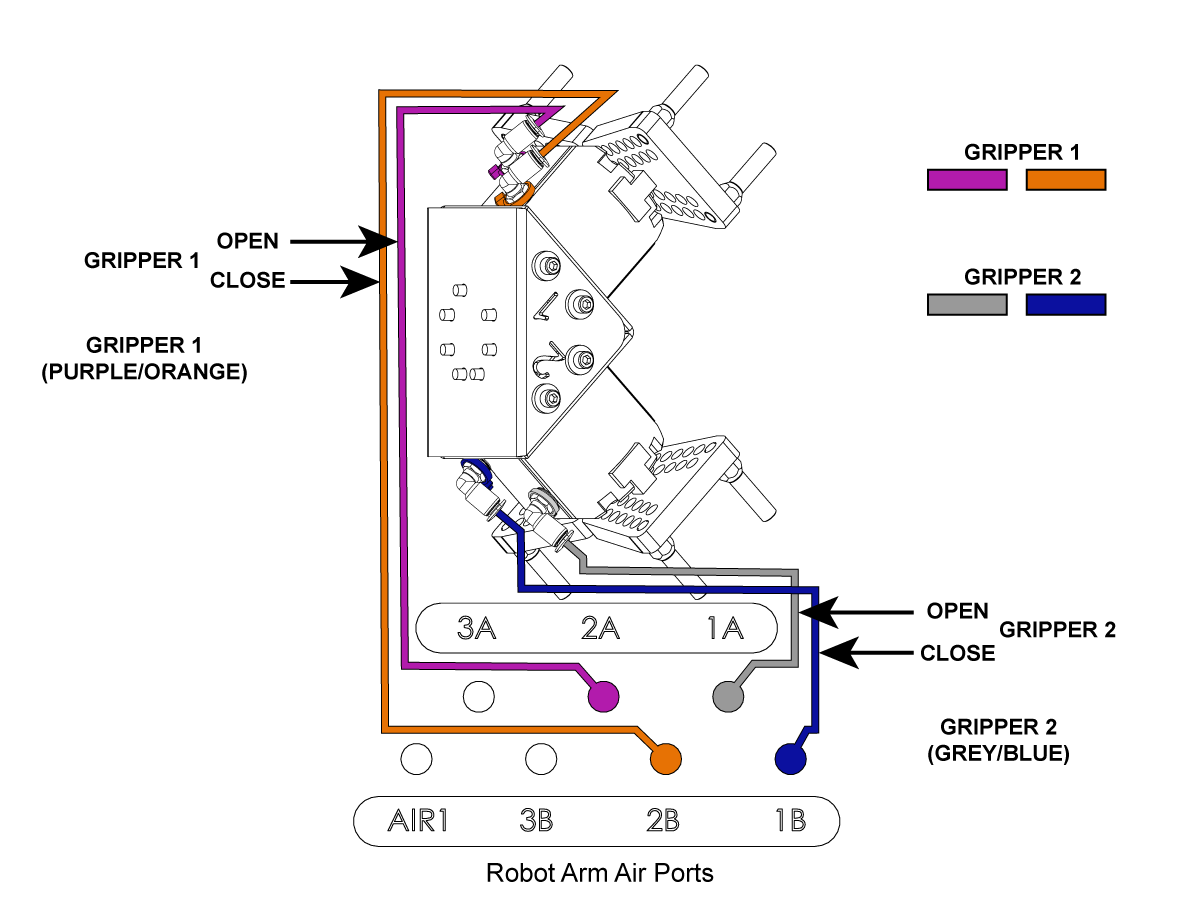
在机器臂和夹持器之间连接气动管线,并连接到相同颜色的配件。
将导管安装至每对气动管线。
注意: 转动 CALM 机柜中的阀门以打开机床空气。
测试紧急停止功能:
测试机器人安全设备:
确保当机器人安全装置被触发时,Haas 控制器上显示急停或光幕触发图标。
注意 如果未显示光幕触发图标,请检测接线、校准和出厂设置: 2191 [694:] LIGHT CURTAIN TYPE 是否为 LC_TYPE_1
。测试夹持器的操作:
测试遥控手轮。
重要提示: 如果尝试操作机器人时出现黄色警告消息,提示 "Please activate Light Curtain or Cell Safe"(“请激活光幕或单元安全”),请重新上传 HBC 配置文件以验证是否应用了安全参数。
验证安全/运行模式运行
所有 Haas 数控设备的控制器侧面均安装了安全锁,以锁定和解锁设置模式。根据选定模式,机器人将具有以下行为。

此过程向您展示如何为机器人配置设置安装角度设置。
-setup/dcs_robot_arm_dsc_zones.png)
每台 Haas 机器人均配有 FANUC 的 DCS 系统。用户可定义机器人的速度和位置限制。如果机器人超出了该限制,DCS 将停止机器人并切断电机电源。
此程序将向您展示如何设置 Fanuc 双重检查安全 (DCS) 区域。
设置 DCS 区域后,创建机器人的存储设备 (MD) 备份。使用笔记本电脑和 iPendant 连接到 Fanuc 控制。
将带有 MD 备份的拇指驱动器插入控制器 (UD1:) 上黑门中的 USB 端口或示教控制器 (UT1:) 上的 USB 端口。
导航到“导航”控制器。
将默认设备设置为您想要的设备。两个选项是 UT1:用于 Fanuc 示教控制器或 UD1:用于 Fanuc 控制柜前面的 USB 端口。
将 MD 备份附加至机床工作订单。
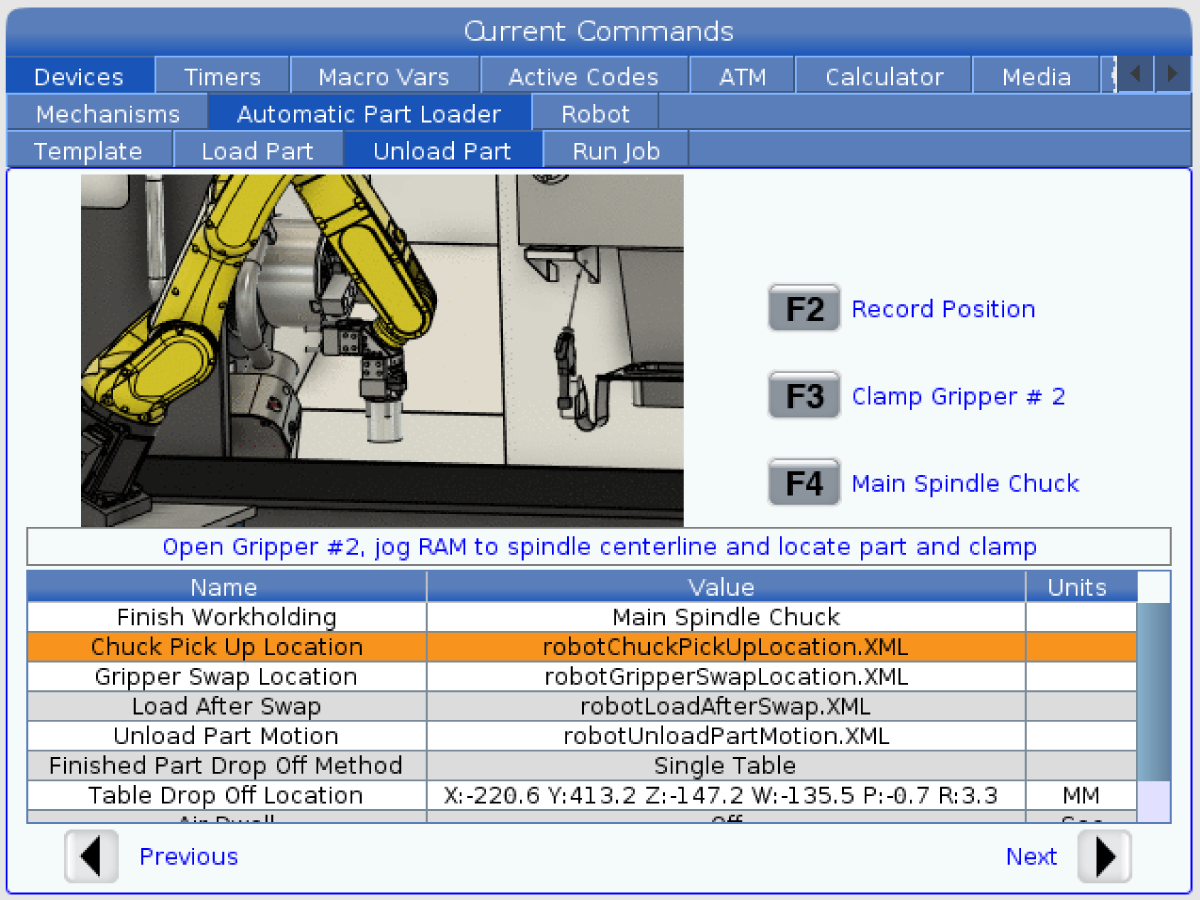
机器人安装完毕后,请按照以下步骤设置作业。

若要禁用机器人,以通过独立模式运行机床设备。按[SETTING]。更改以下设置:
Recently Viewed Items
You Have No Recently Viewed Items Yet

此价格包含运费、出口和进口关税、保险费以及任何在运送至与您(买家)商定的位于法国的某一地点的过程中产生的其他费用。在 Haas 数控产品的交付中不会添加任何其他强制性费用。
随时掌握 HAAS 最新提示和技术……
HAAS TOOLING 接受以下条件:


This site is protected by reCAPTCHA and the Google Privacy Policy and Terms of Service apply.

2800 Sturgis Rd., Oxnard, CA 93030 / Toll Free: 800-331-6746
Phone: 805-278-1800 / Fax: 805-278-2255