-
máquinas
-
 Fresadoras verticales
Fresadoras verticales
Fresadoras verticales
Fresadoras verticales -
 Soluciones multieje
Soluciones multieje
Soluciones multieje
Soluciones multieje -
 Tornos
Tornos
Tornos
Tornos -
 Fresadoras horizontales
Fresadoras horizontales
Fresadoras horizontales
Fresadoras horizontales -
 Mesas giratorias y divisores
Mesas giratorias y divisores
Mesas giratorias y divisores
Mesas giratorias y divisores -
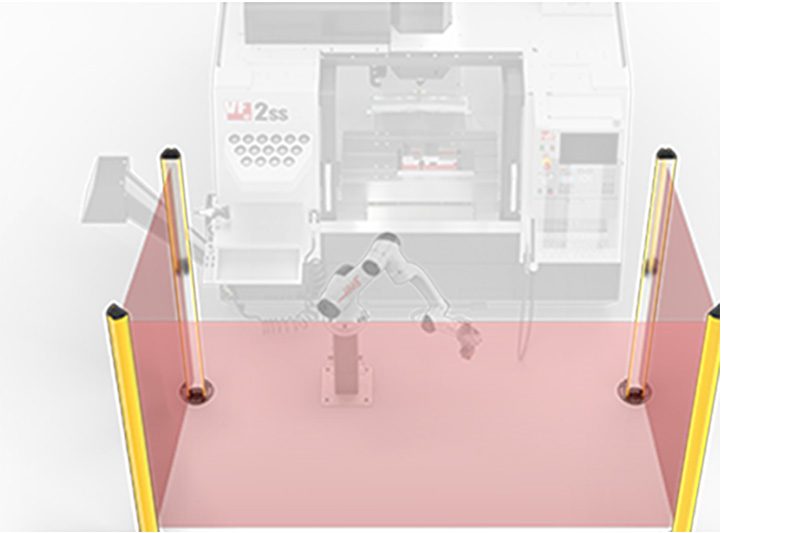
 Sistemas de automatización
Sistemas de automatización
Sistemas de automatización
Sistemas de automatización -
 Máquinas de sobremesa
Máquinas de sobremesa
Máquinas de sobremesa
Máquinas de sobremesa -
 Equipo de taller
Equipo de taller
Equipo de taller
Equipo de taller
COMPRAR HERRAMIENTAS¿QUIERE HABLAR CON ALGUIEN?En las tiendas Haas Factory Outlet (HFO) pueden resolver sus dudas y orientarlo sobre las mejores opciones.
CONTACT YOUR DISTRIBUTOR > -
-
Opciones
-
 Husillos
Husillos
Husillos
Husillos -
 Cambiadores de herramientas
Cambiadores de herramientas
Cambiadores de herramientas
Cambiadores de herramientas -
 4.º | 5.º eje
4.º | 5.º eje
4.º | 5.º eje
4.º | 5.º eje -
 Torretas y herramientas motorizadas
Torretas y herramientas motorizadas
Torretas y herramientas motorizadas
Torretas y herramientas motorizadas -
 Palpado
Palpado
Palpado
Palpado -
 Tratamiento de refrigerante y virutas
Tratamiento de refrigerante y virutas
Tratamiento de refrigerante y virutas
Tratamiento de refrigerante y virutas -
 El Control Haas
El Control Haas
El Control Haas
El Control Haas -
 Opciones para productos
Opciones para productos
Opciones para productos
Opciones para productos -
 Herramientas y utillaje
Herramientas y utillaje
Herramientas y utillaje
Herramientas y utillaje -
 Portapiezas
Portapiezas
Portapiezas
Portapiezas -
 Soluciones de 5 ejes
Soluciones de 5 ejes
Soluciones de 5 ejes
Soluciones de 5 ejes -
 Automatización
Automatización
Automatización
Automatización
COMPRAR HERRAMIENTAS¿QUIERE HABLAR CON ALGUIEN?En las tiendas Haas Factory Outlet (HFO) pueden resolver sus dudas y orientarlo sobre las mejores opciones.
CONTACT YOUR DISTRIBUTOR > -
-
Why Haas
Descubra la diferencia Haas
-
Servicio técnico
- Vídeos
-
Herramientas de Haas
- Herramientas de Haas
-
Winner's Circle
-
Winner's Circle
-
Grandes ofertas de hoy
-
Liquidación
-
Medición e inspección
-
Cobots y accesorios
-
Soporte de taller
-
Portaherramientas para fresadoras
-
Herramientas para fresadoras
-
Sistemas de mandrinar
-
Amarres y sujeciones para fresadoras
-
Portaherramientas para tornos
-
Herramientas de tornos
-
AMARRES Y SUJECIONES PARA TORNOS
-
Packs de herramientas
-
Pinzas y mandriles ER
-
Hacer agujeros
-
Roscar
-
Brochado
-
Cubos
-
Platos de fresado
-
Desbarbado y abrasivos
-
Medidor de herramientas y máquinas de ajuste por contracción
-
Almacenamiento de herramientas
-
Mantenimiento de máquinas
-
Accesorios para herramientas
-
Vestuario y accesorios
 Accesorios de automatización
Accesorios de automatización
 Soporte de taller
Soporte de taller
 Portaherramientas de fresadora
Herramientas de corte para fresadora
Portaherramientas de fresadora
Herramientas de corte para fresadora
 Sistemas de mandrinar
Sistemas de mandrinar
 Amarre de pieza de fresadora
Amarre de pieza de fresadora
 Portaherramientas para tornos
Herramientas de corte para torno
Portaherramientas para tornos
Herramientas de corte para torno
 Amarres y sujeciones para tornos
Amarres y sujeciones para tornos
 Packs de herramientas
Packs de herramientas
 Platos de pinza ER
Hacer agujeros
Roscado
Platos de pinza ER
Hacer agujeros
Roscado
 Brocas
Brocas
 Kits y cubos
Kits y cubos
 Platos manuales para fresado
Platos manuales para fresado
 Desbarbado y abrasivos
Medidor de herramientas y máquinas de ajuste por contracción
Desbarbado y abrasivos
Medidor de herramientas y máquinas de ajuste por contracción
 Almacenamiento y manipulación
Almacenamiento y manipulación
 Mantenimiento de máquinas
Mantenimiento de máquinas
 Accesorios de herramientas
Accesorios de herramientas
 Vestuario y accesorios
Vestuario y accesorios
 Medición e inspección
Medición e inspección
 Winner's Circle
Winner's Circle
 Holgura
Holgura
 Grandes ofertas del día
Grandes ofertas del día
























---vertical---installation/2019-10-08_15h56_48.jpg)