-
Maschinen
-
Vertikale Fräsmaschinen
Vertikale Fräsmaschinen
-
Mehrachsen-Lösungen
Mehrachsen-Lösungen
-
Drehmaschinen
Drehmaschinen
-
Horizontal-Fräsmaschinen
Horizontal-Fräsmaschinen
-
Dreh- und Indexiertische
Dreh- und Indexiertische
-
Automatisierungssysteme
Automatisierungssysteme
-
Tischmaschinen
Tischmaschinen
-
Werkstattausrüstattung
Werkstattausrüstattung
-
Fertigungsmaschinen
Fertigungsmaschinen
EINKAUFSINFORMATIONENMÖCHTEN SIE MIT JEMANDEM SPRECHEN?Ihr Haas-Händler (Haas Factory Outlet, HFO) kann Ihre Fragen beantworten und Sie durch die besten Varianten führen.
CONTACT YOUR DISTRIBUTOR > -
Vertikale Fräsmaschinen
-
Sonderzubehör
-
/2026-04-VOP-SquareComponent.jpg/_jcr_content/renditions/cq5dam.thumbnail.319.319.png) Wertoptionspakete
Wertoptionspakete
Wertoptionspakete
Wertoptionspakete -
 Spindeln
Spindeln
Spindeln
Spindeln -
 Werkzeugwechsler
Werkzeugwechsler
Werkzeugwechsler
Werkzeugwechsler -
 4- | 5-Achsen
4- | 5-Achsen
4- | 5-Achsen
4- | 5-Achsen -
 Revolver und angetriebene Werkzeuge
Revolver und angetriebene Werkzeuge
Revolver und angetriebene Werkzeuge
Revolver und angetriebene Werkzeuge -
 Messtasten
Messtasten
Messtasten
Messtasten -
 Späneabfuhr- und Kühlmittelverwaltung
Späneabfuhr- und Kühlmittelverwaltung
Späneabfuhr- und Kühlmittelverwaltung
Späneabfuhr- und Kühlmittelverwaltung -
 Die Haas Steuerung
Die Haas Steuerung
Die Haas Steuerung
Die Haas Steuerung -
 Produktoptionen
Produktoptionen
Produktoptionen
Produktoptionen -
 Werkzeuge und Spannvorrichtungen
Werkzeuge und Spannvorrichtungen
Werkzeuge und Spannvorrichtungen
Werkzeuge und Spannvorrichtungen -
 Werkstückhalterung
Werkstückhalterung
Werkstückhalterung
Werkstückhalterung -
 5-Achsen-Lösungen
5-Achsen-Lösungen
5-Achsen-Lösungen
5-Achsen-Lösungen -
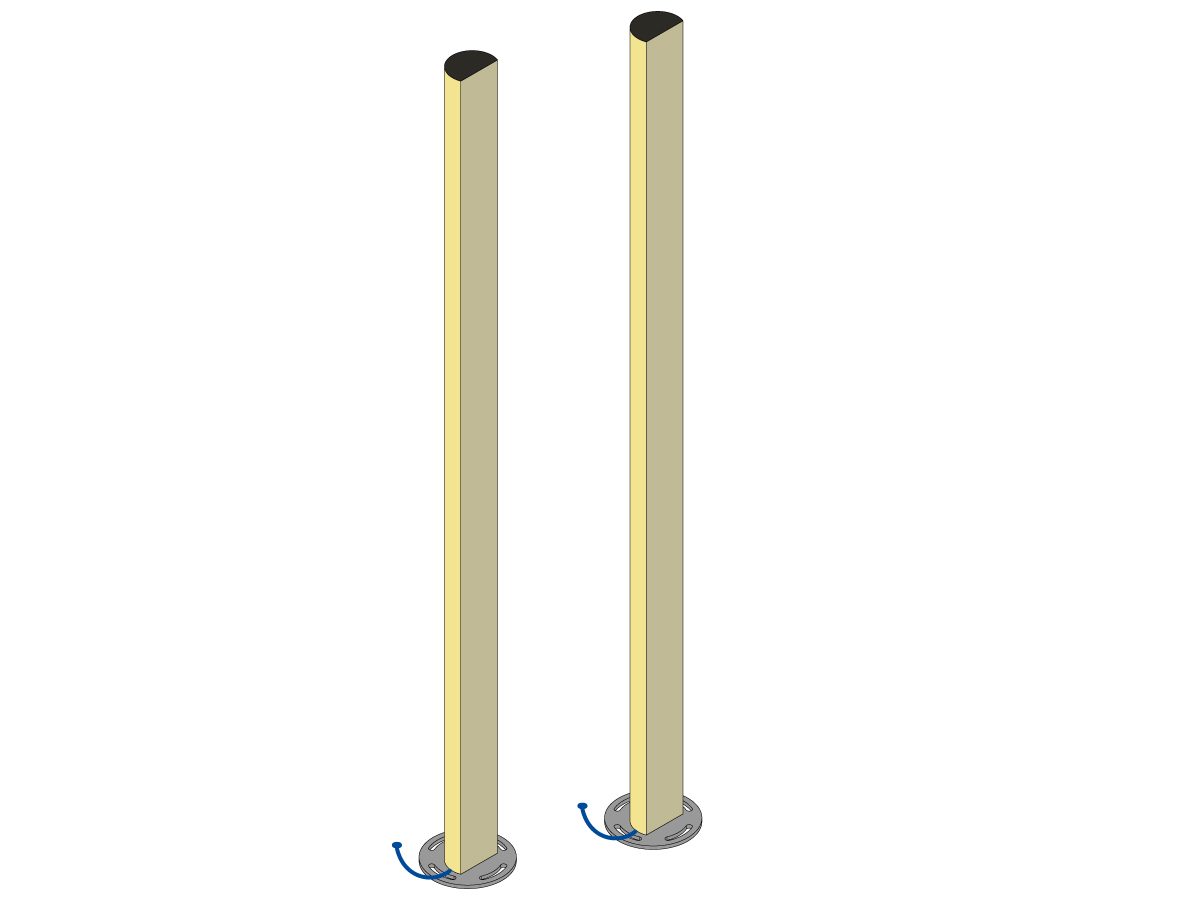
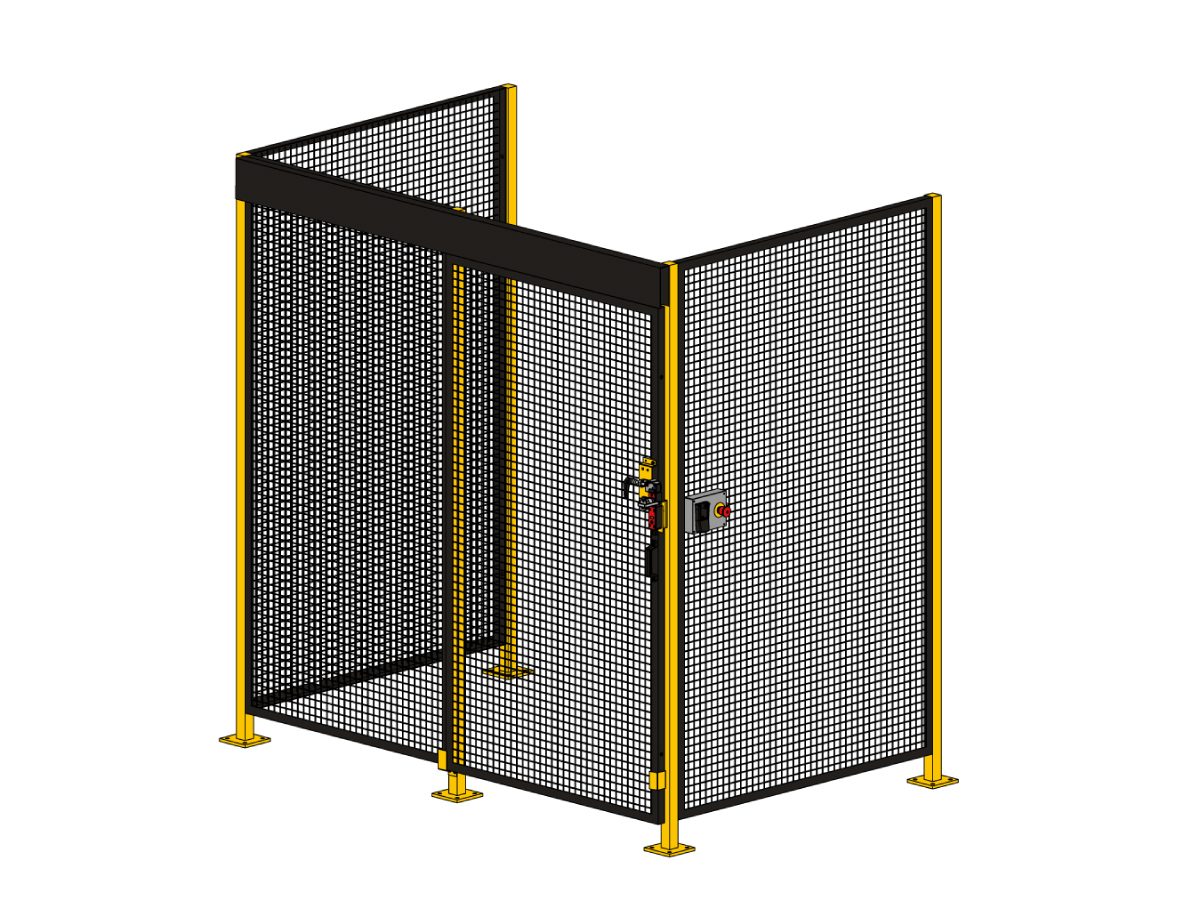
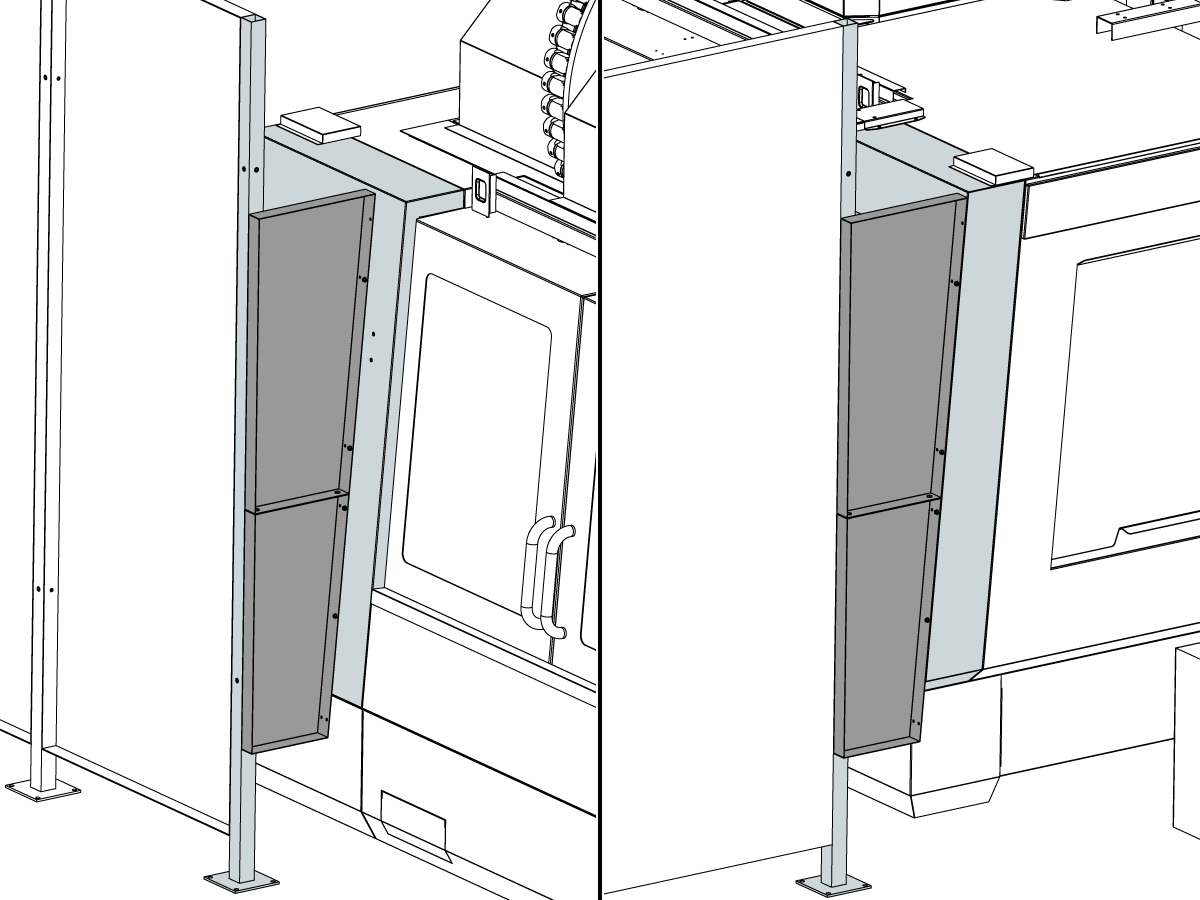
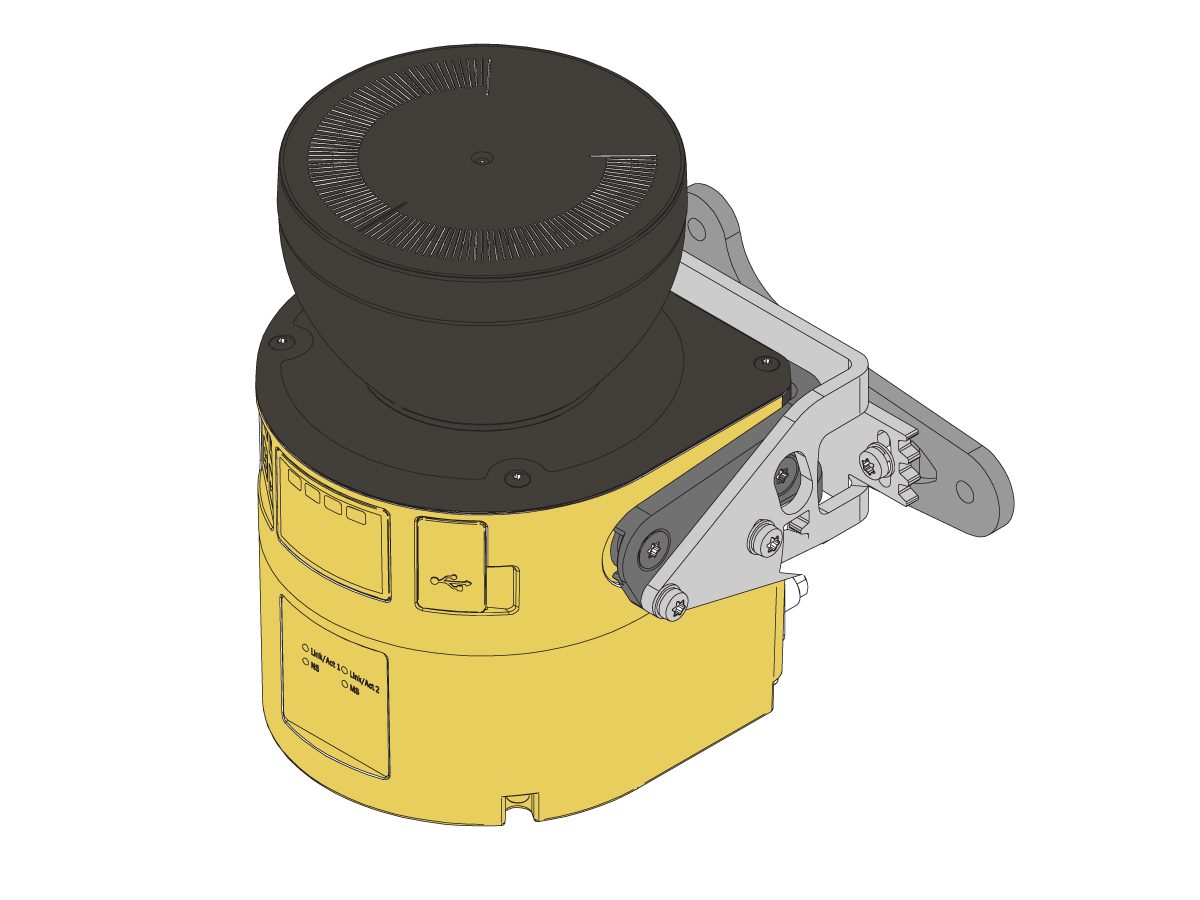
 Automatisierung
Automatisierung
Automatisierung
Automatisierung
EINKAUFSINFORMATIONENMÖCHTEN SIE MIT JEMANDEM SPRECHEN?Ihr Haas-Händler (Haas Factory Outlet, HFO) kann Ihre Fragen beantworten und Sie durch die besten Varianten führen.
CONTACT YOUR DISTRIBUTOR > -
-
Why Haas
Entdecken Sie den Haas Unterschied
-
Service
Willkommen bei Haas Service
- Videos
- Haas Werkzeuge










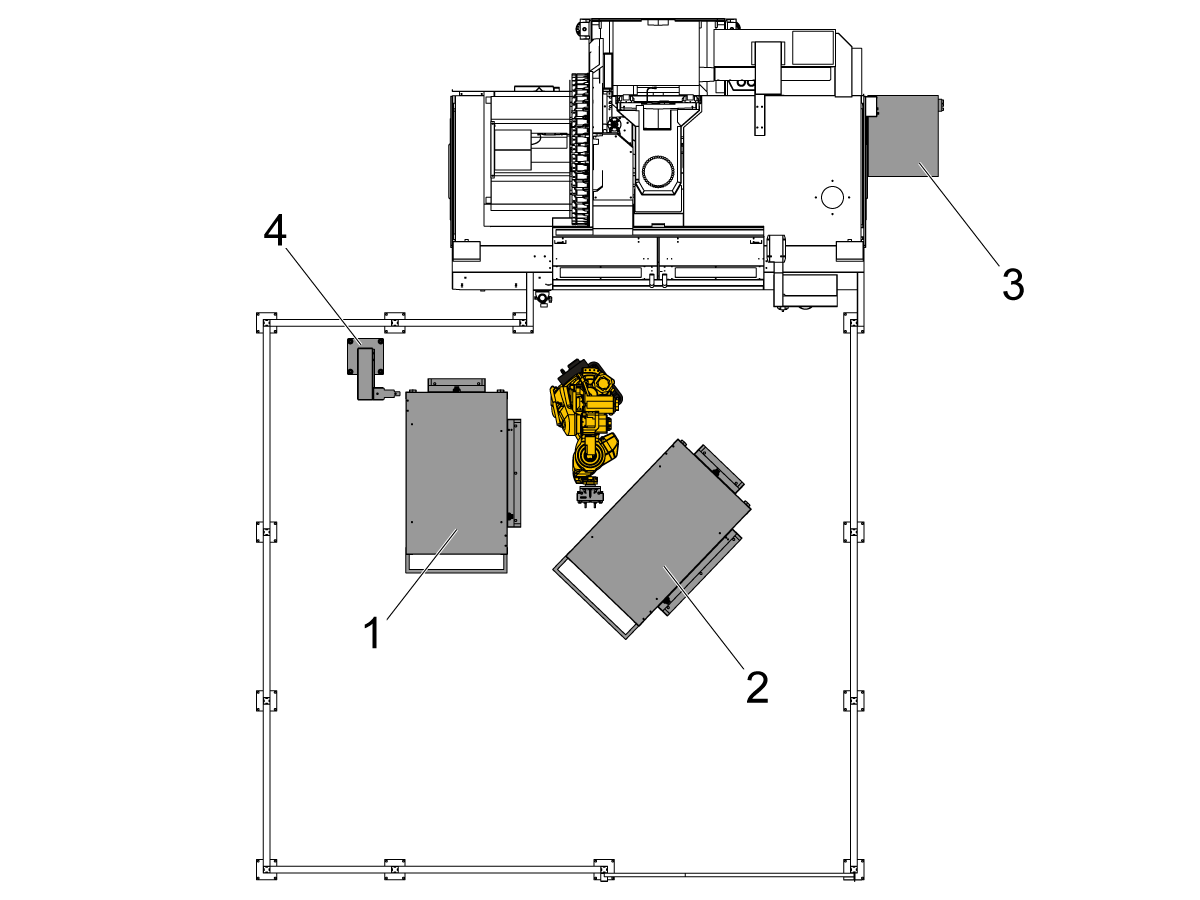
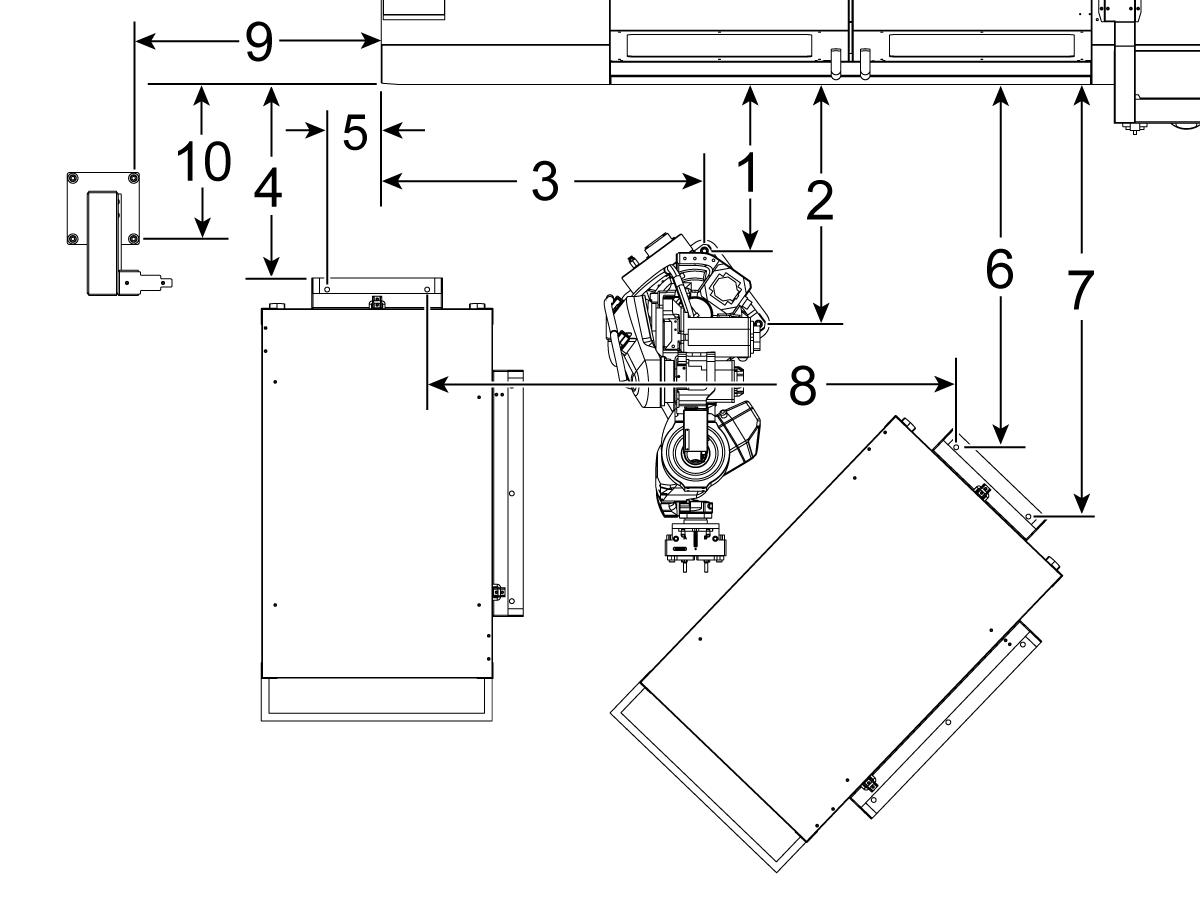
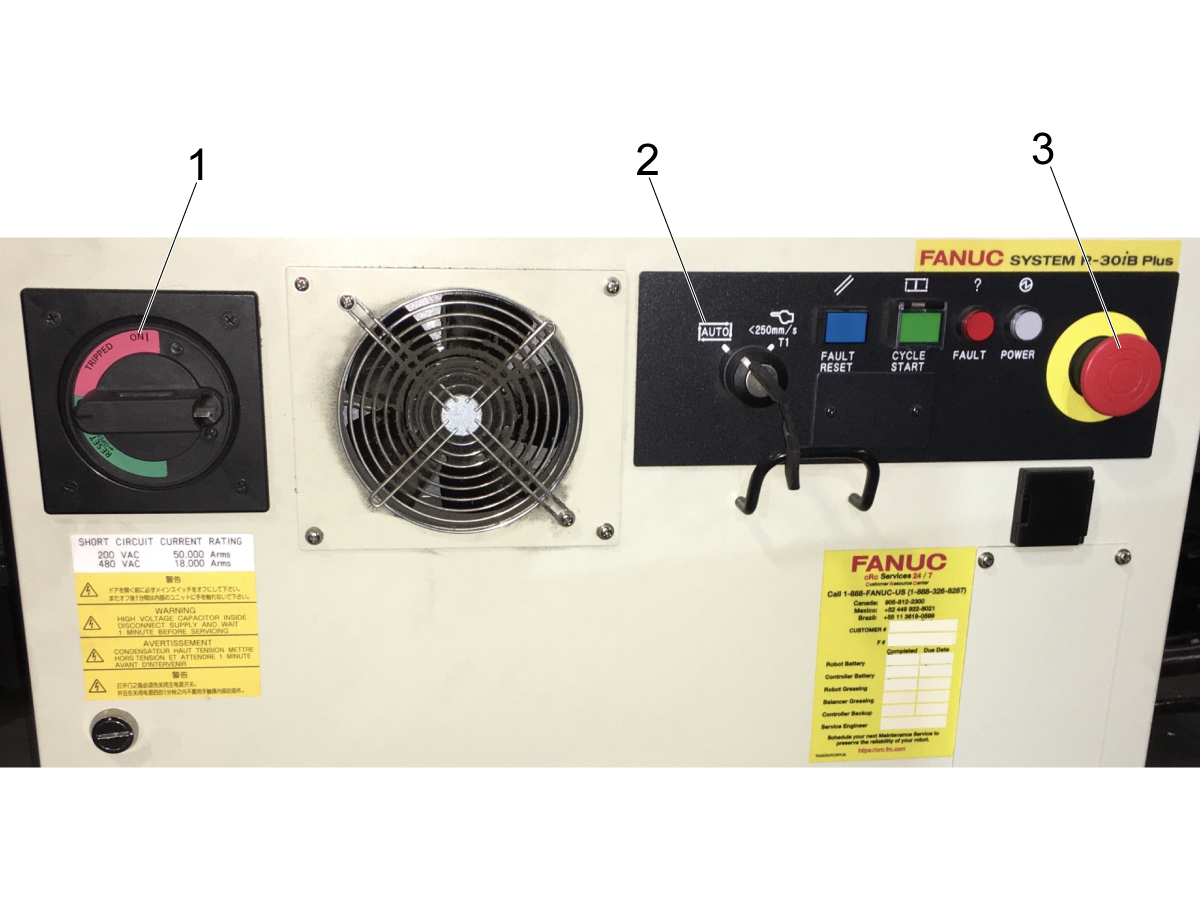



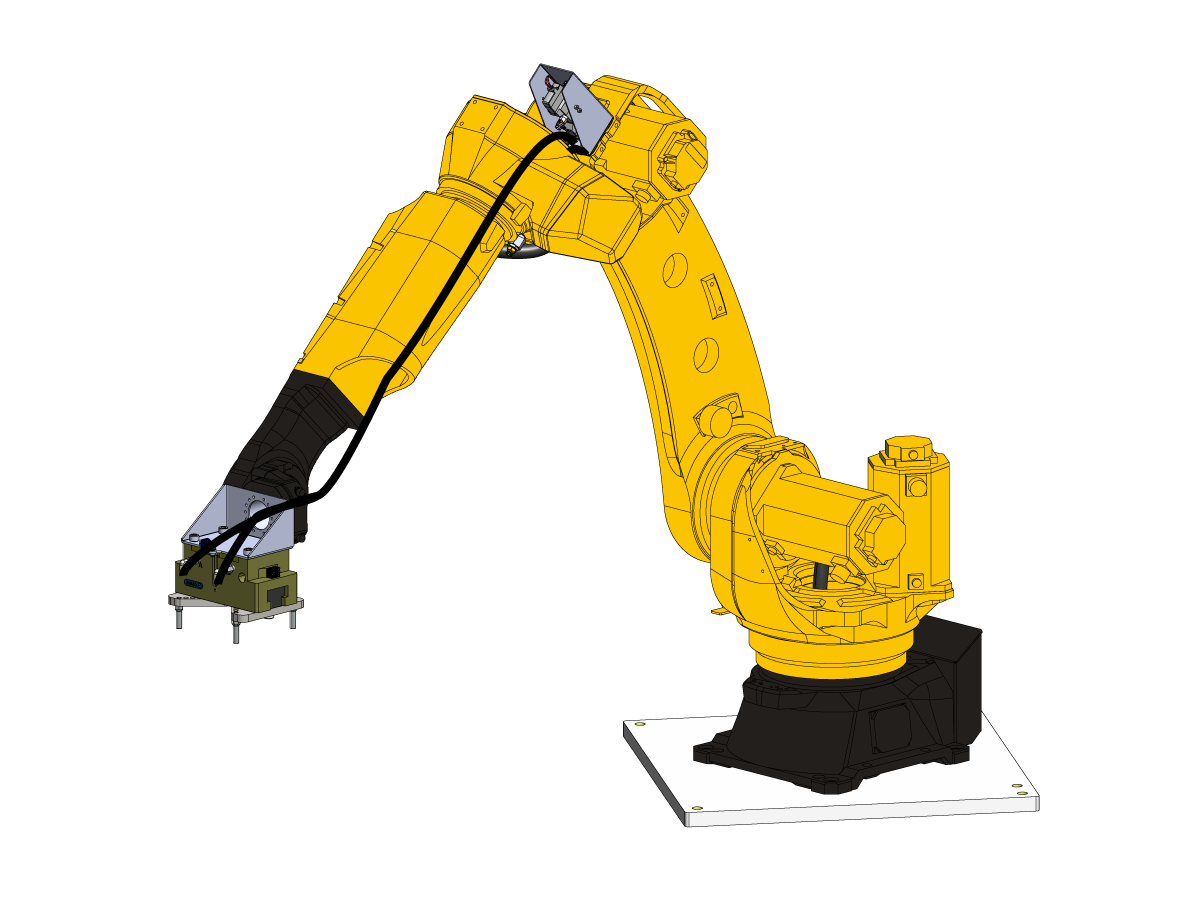
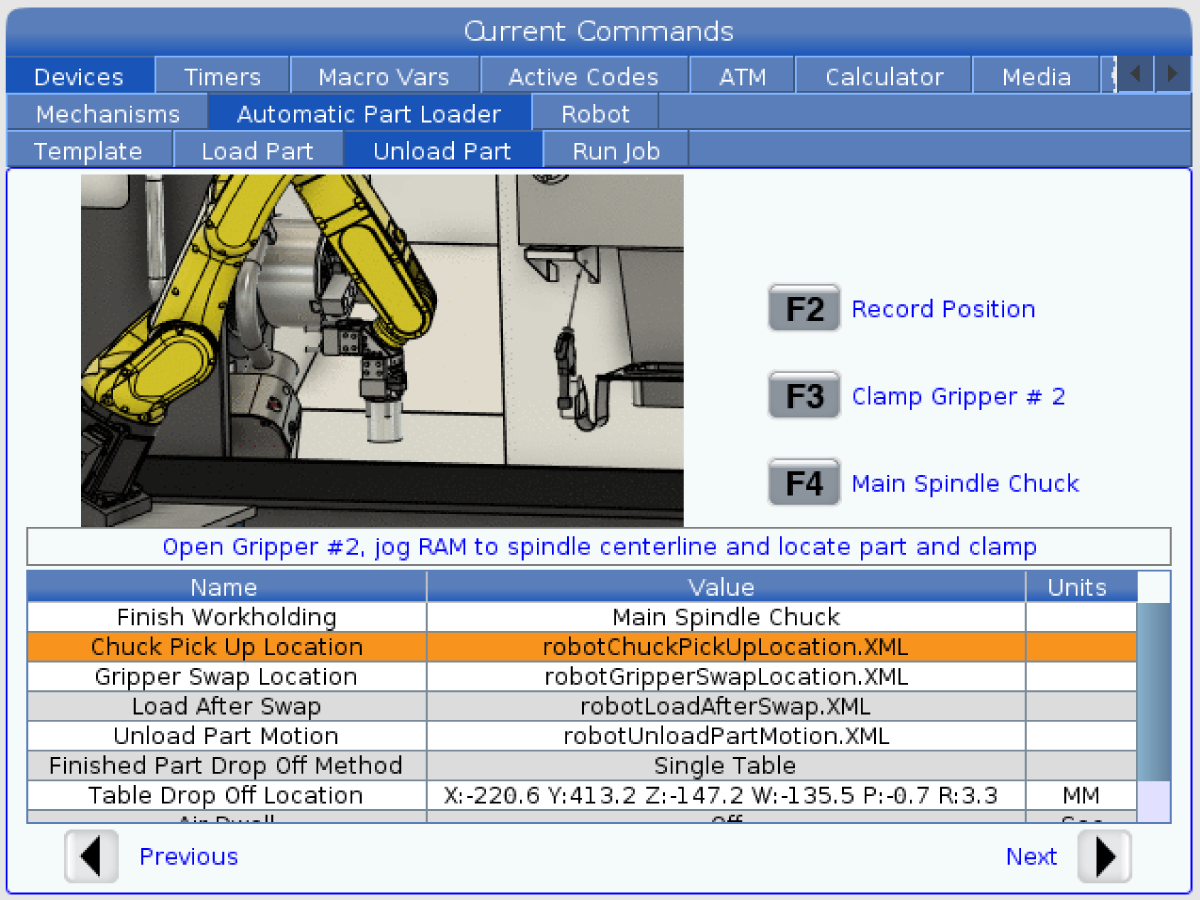
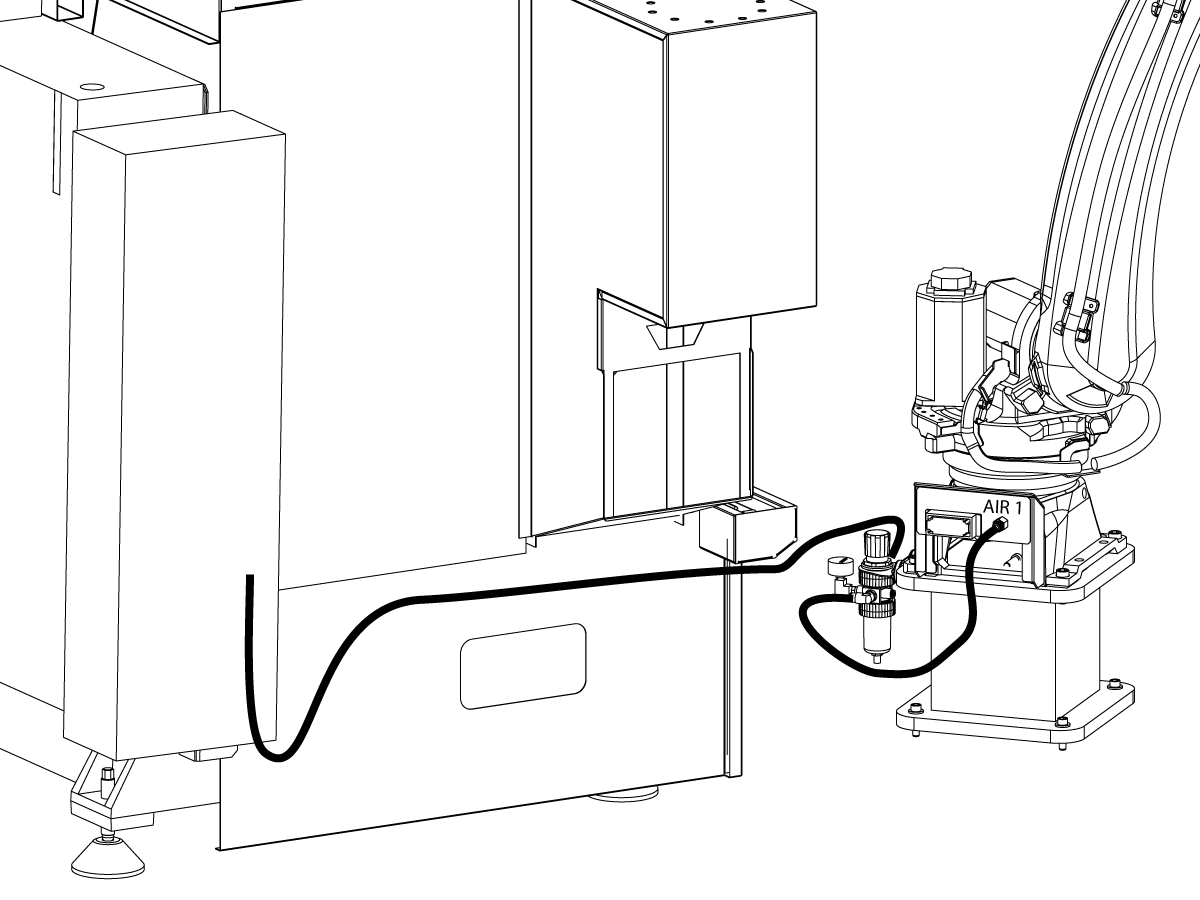
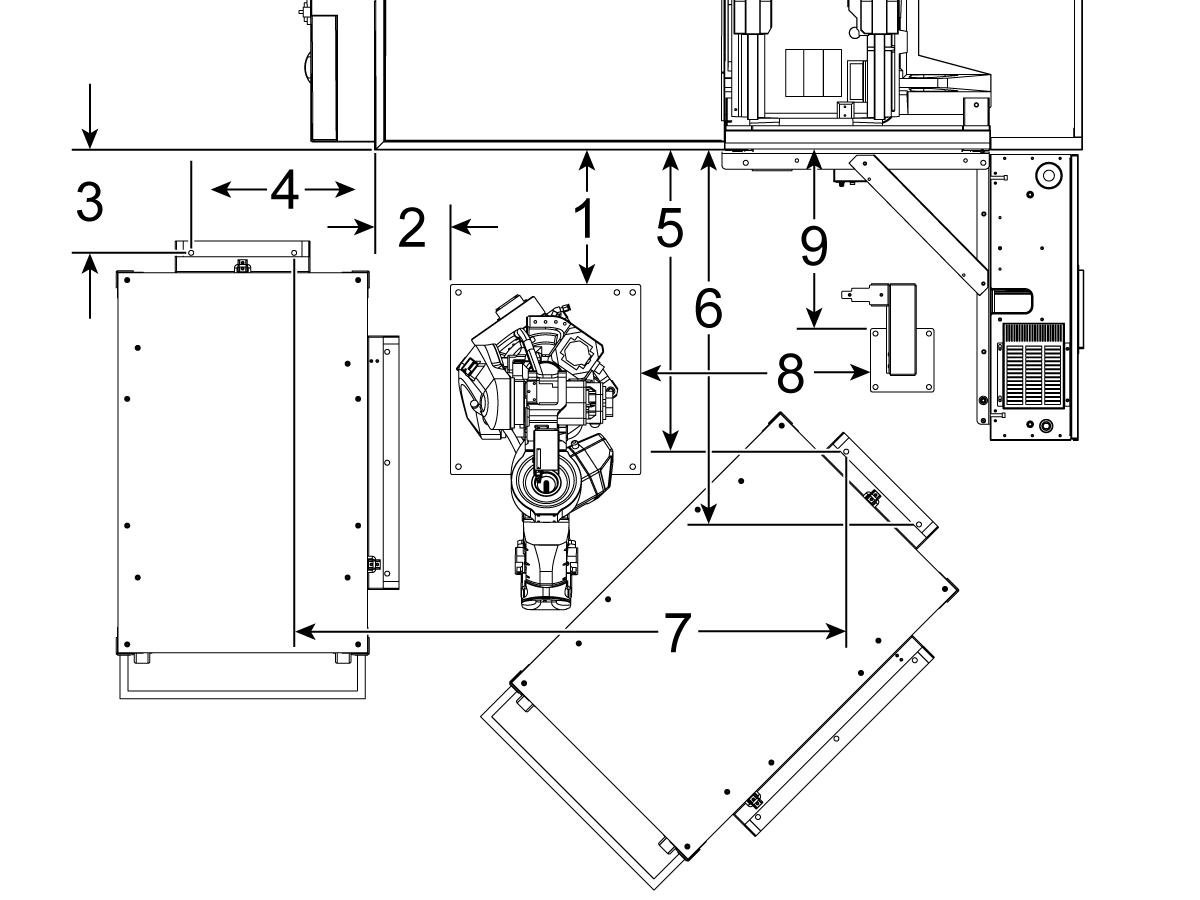
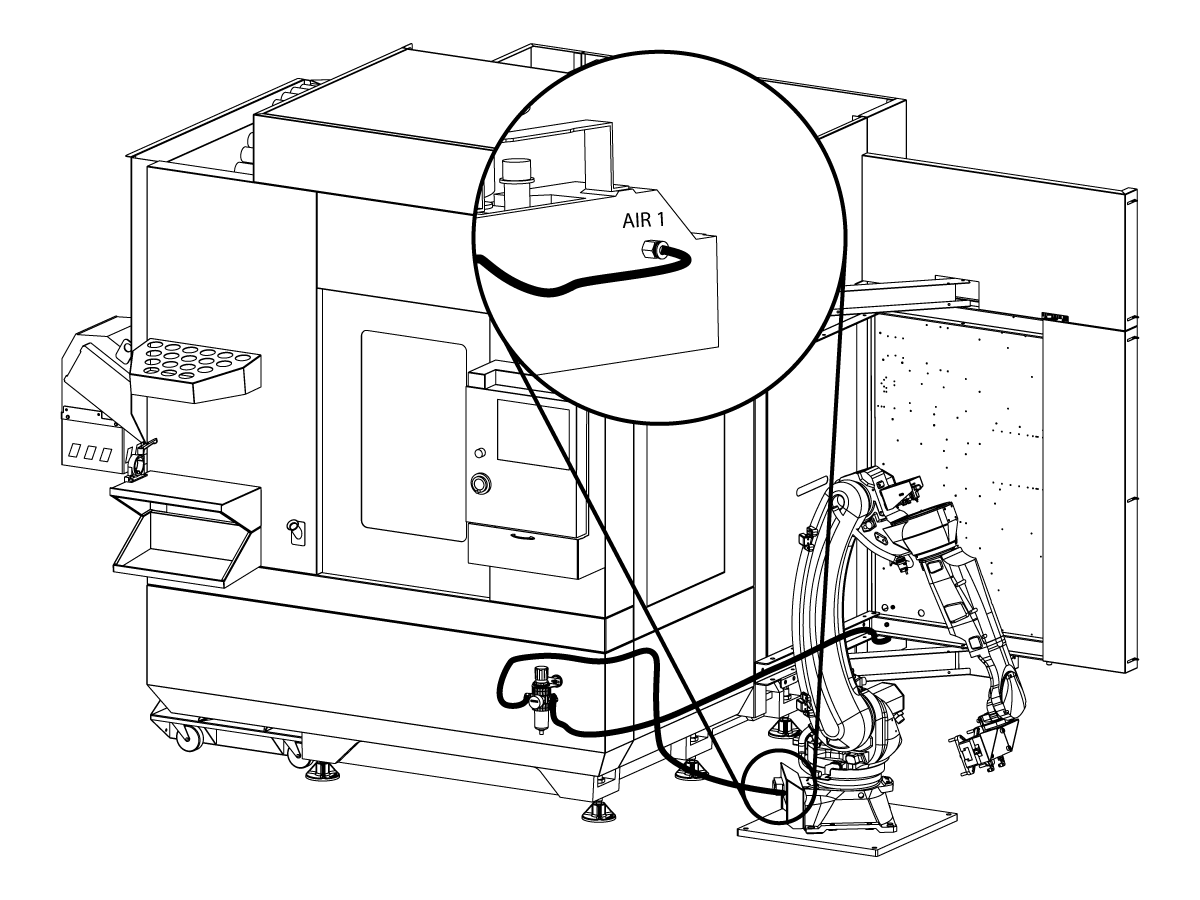
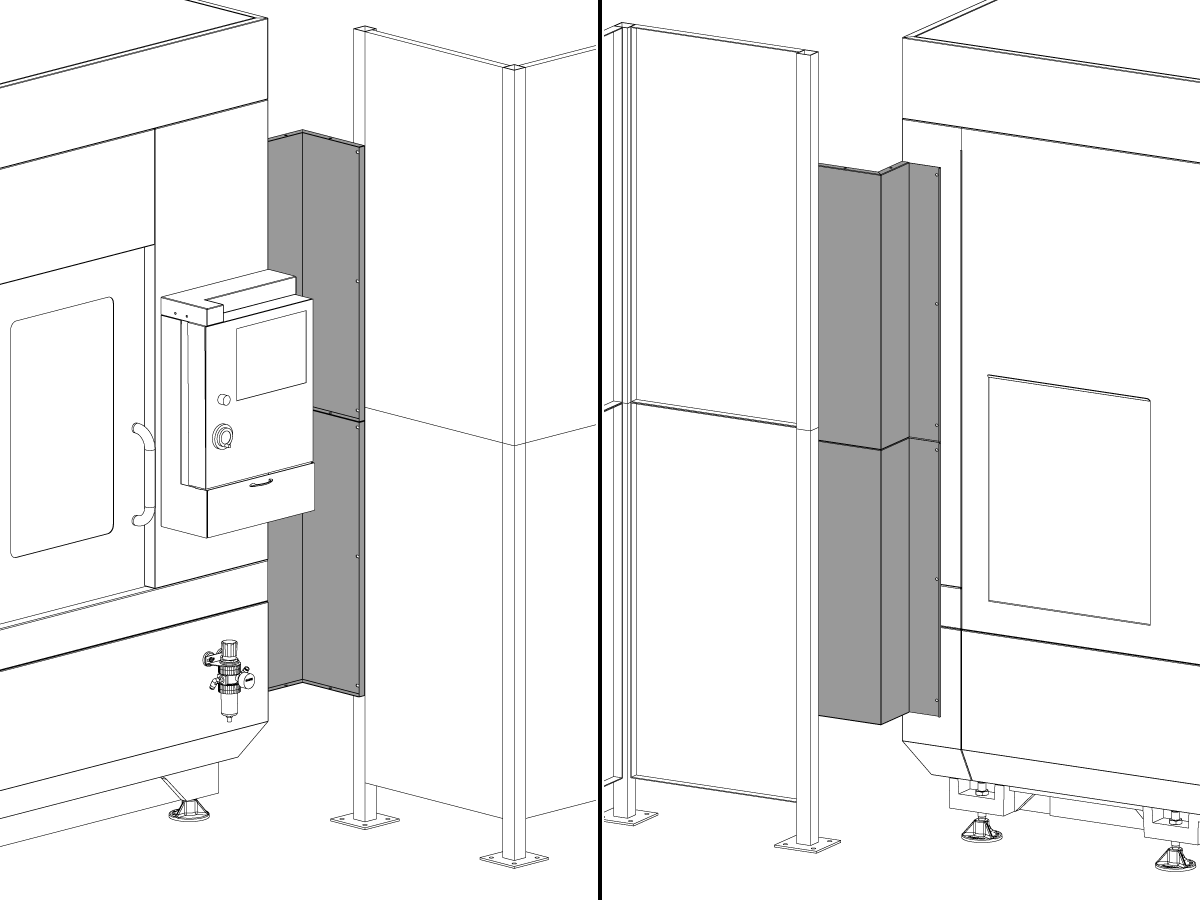
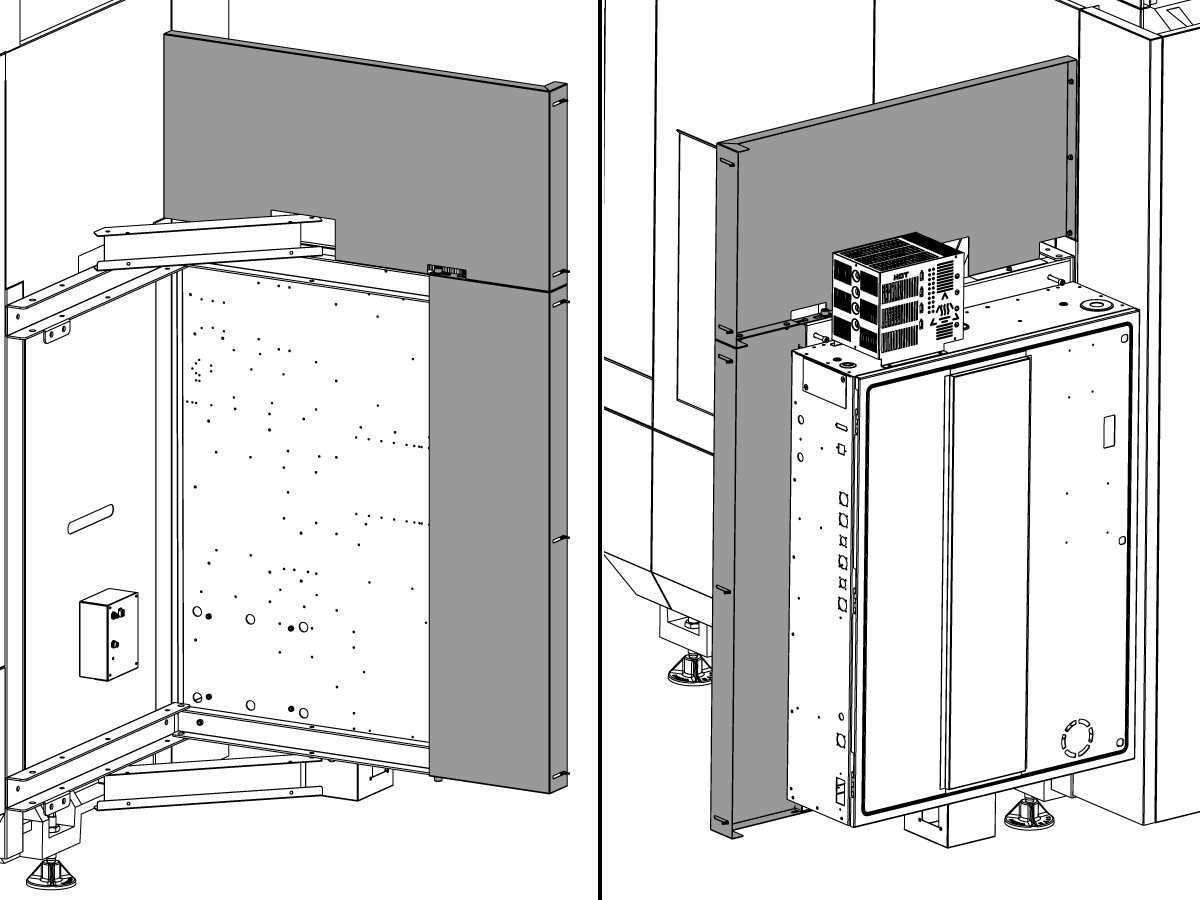
-setup/dcs_robot_arm_dsc_zones.png)

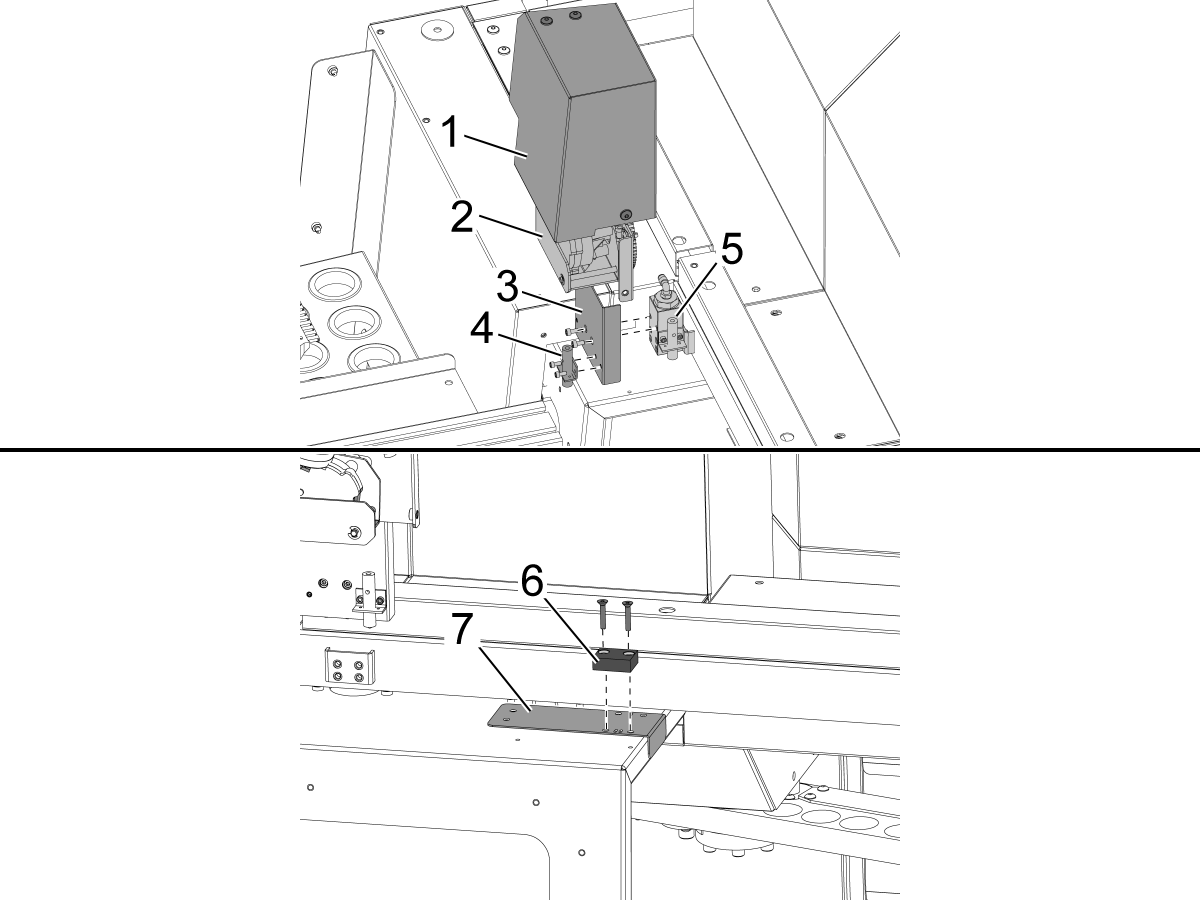
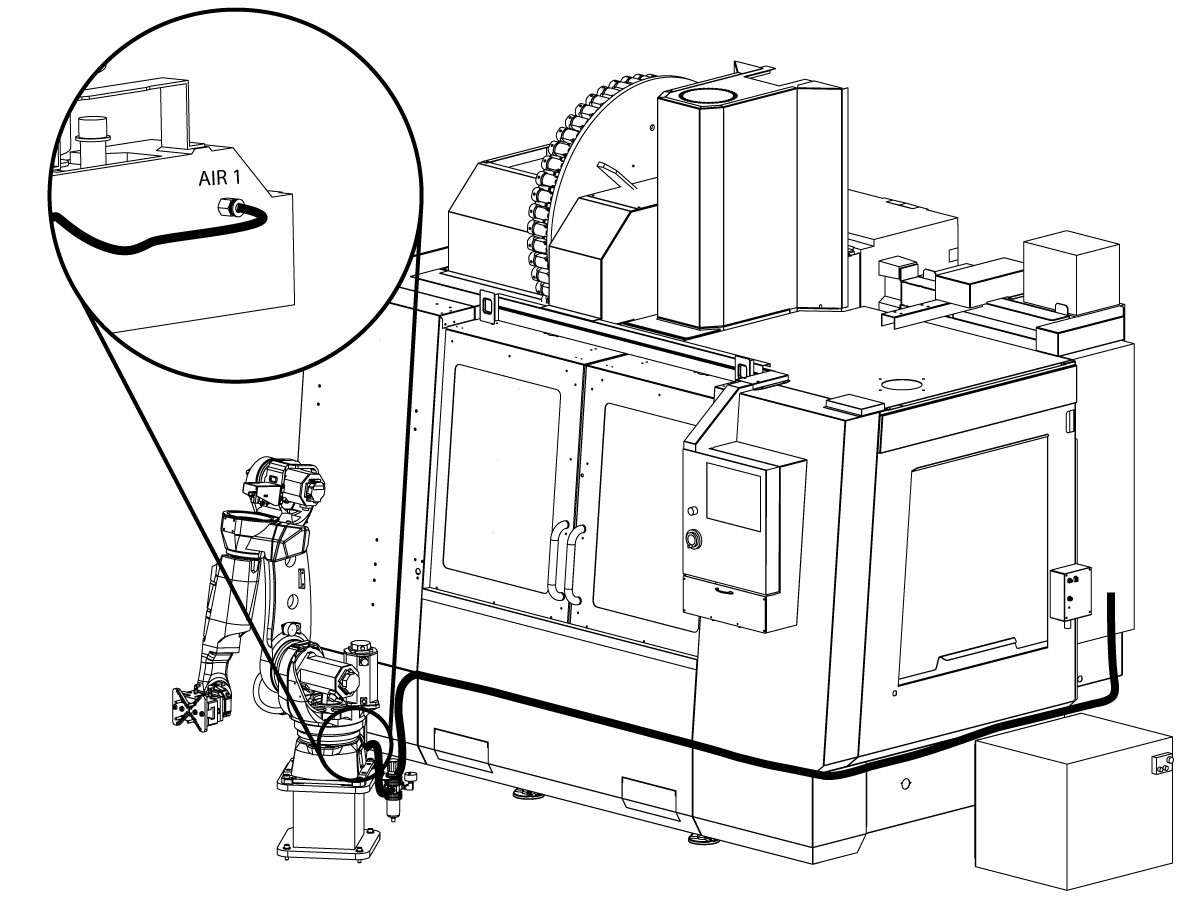
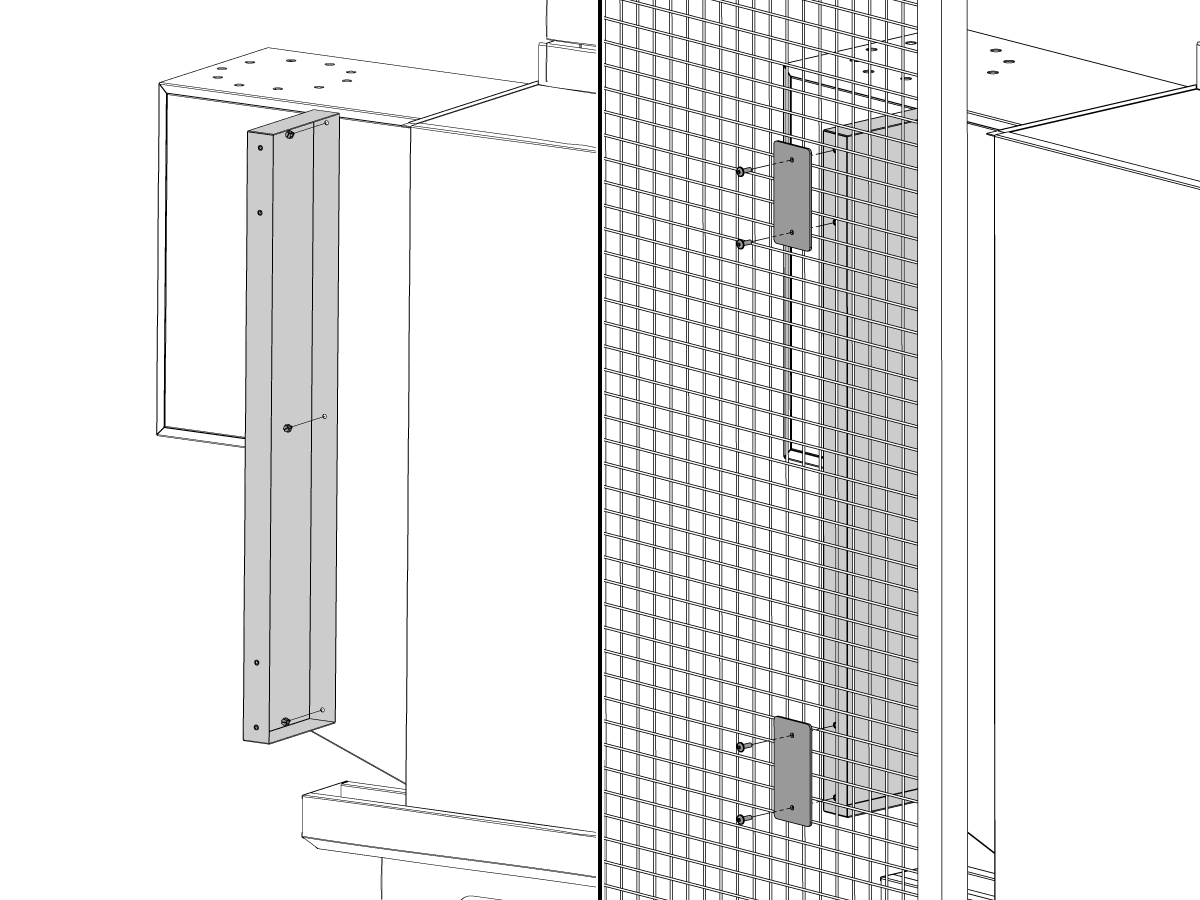
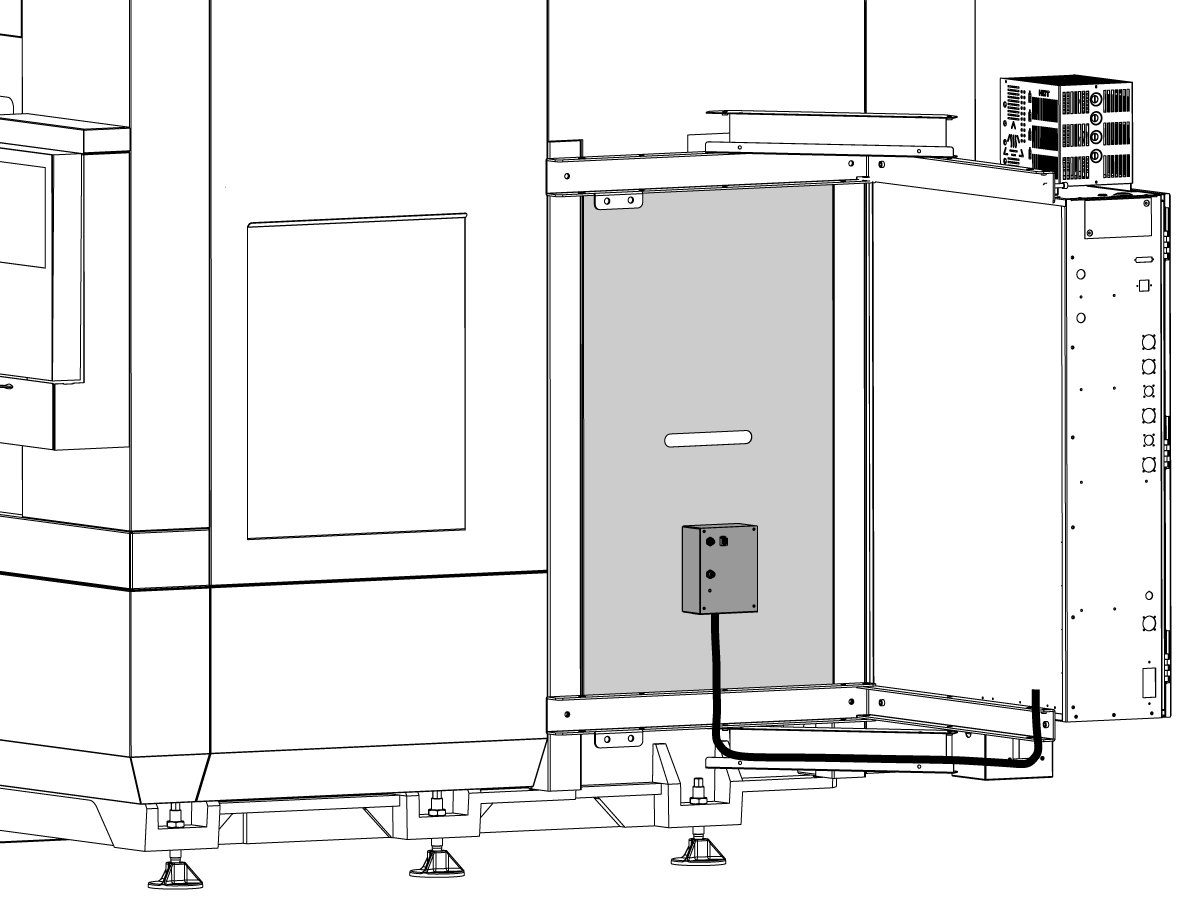
---vertical---installation/2019-10-08_15h56_48.jpg)

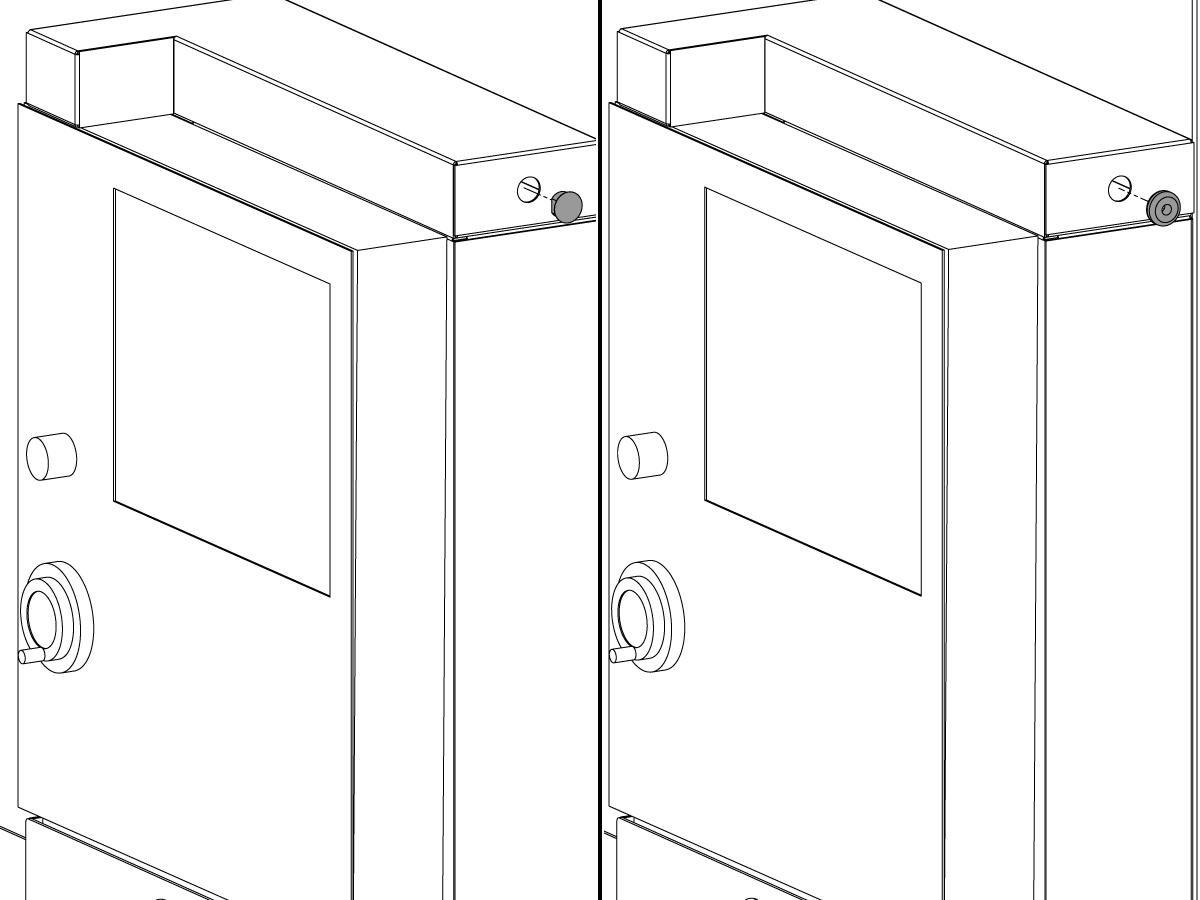
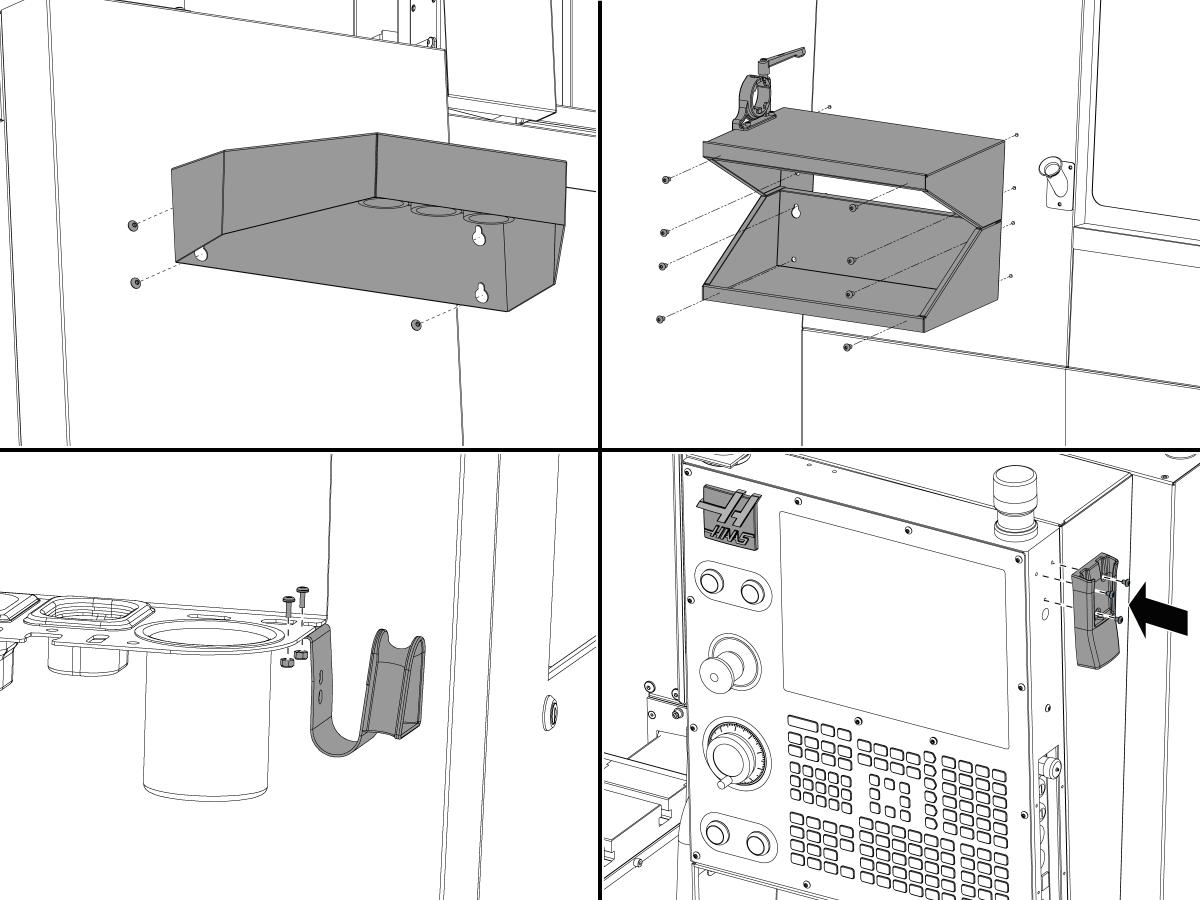
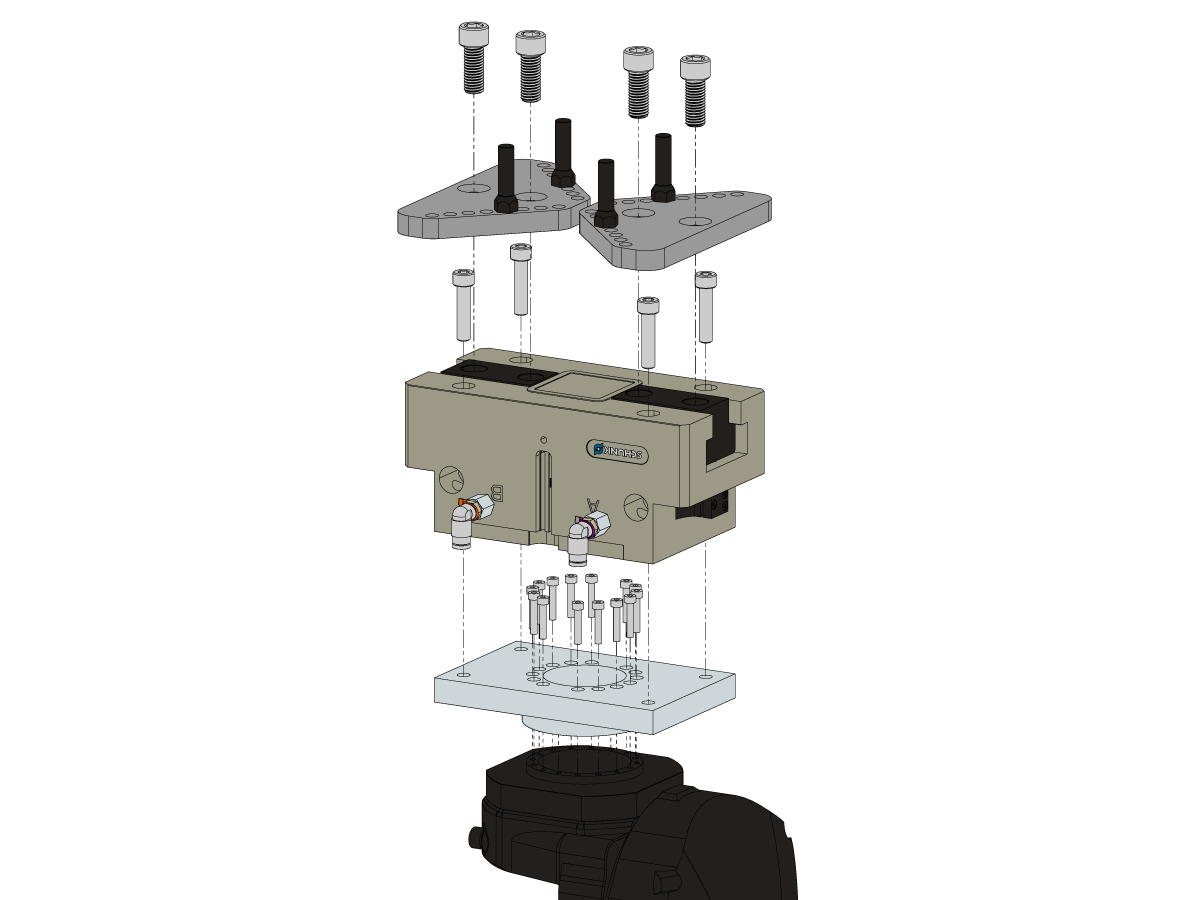
.png)
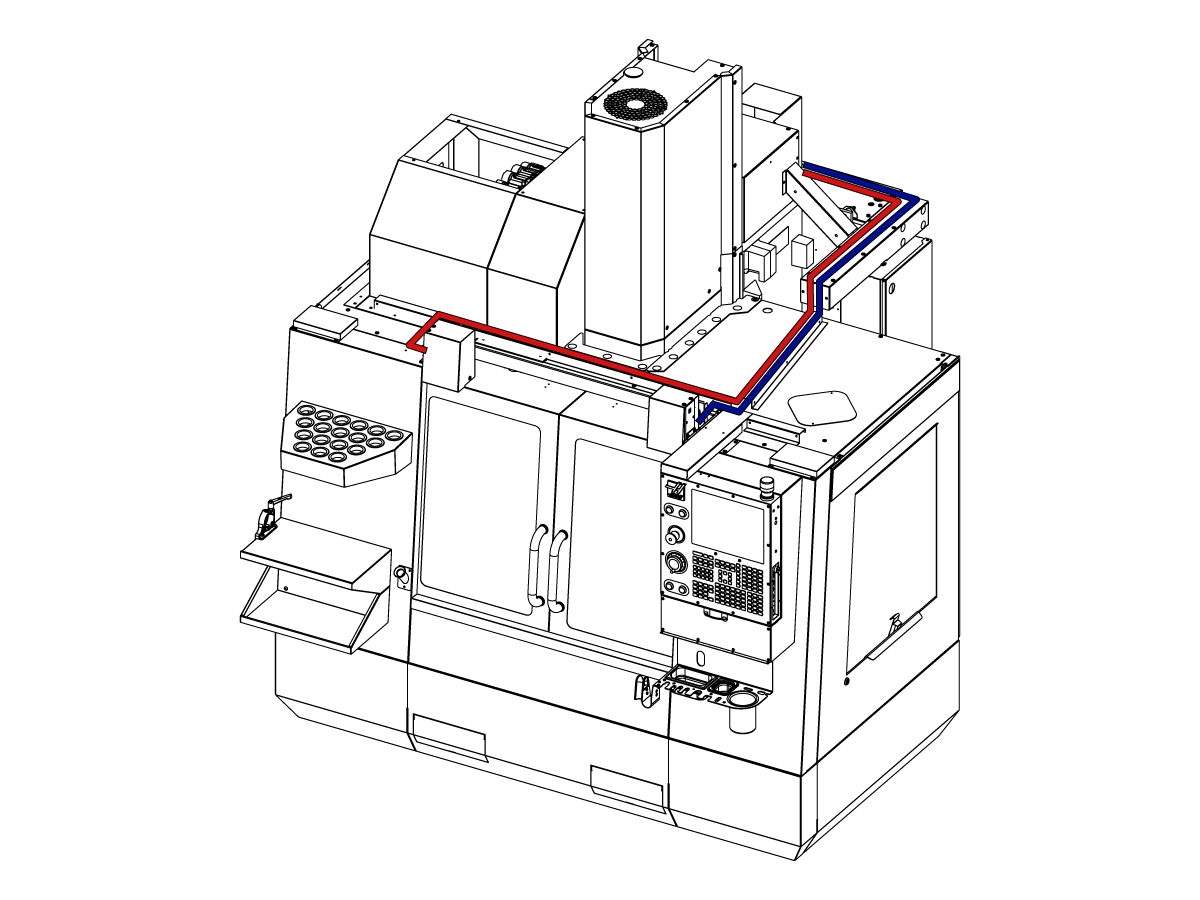
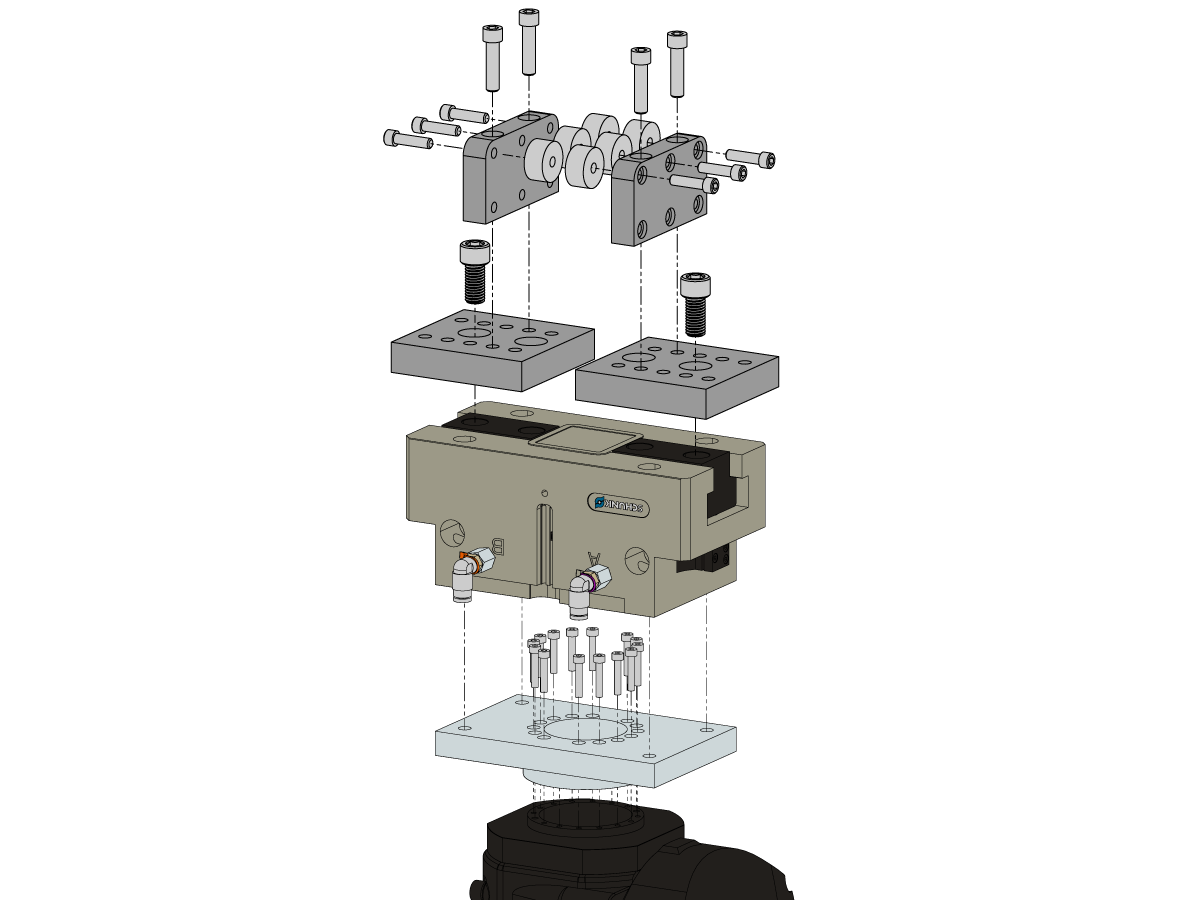
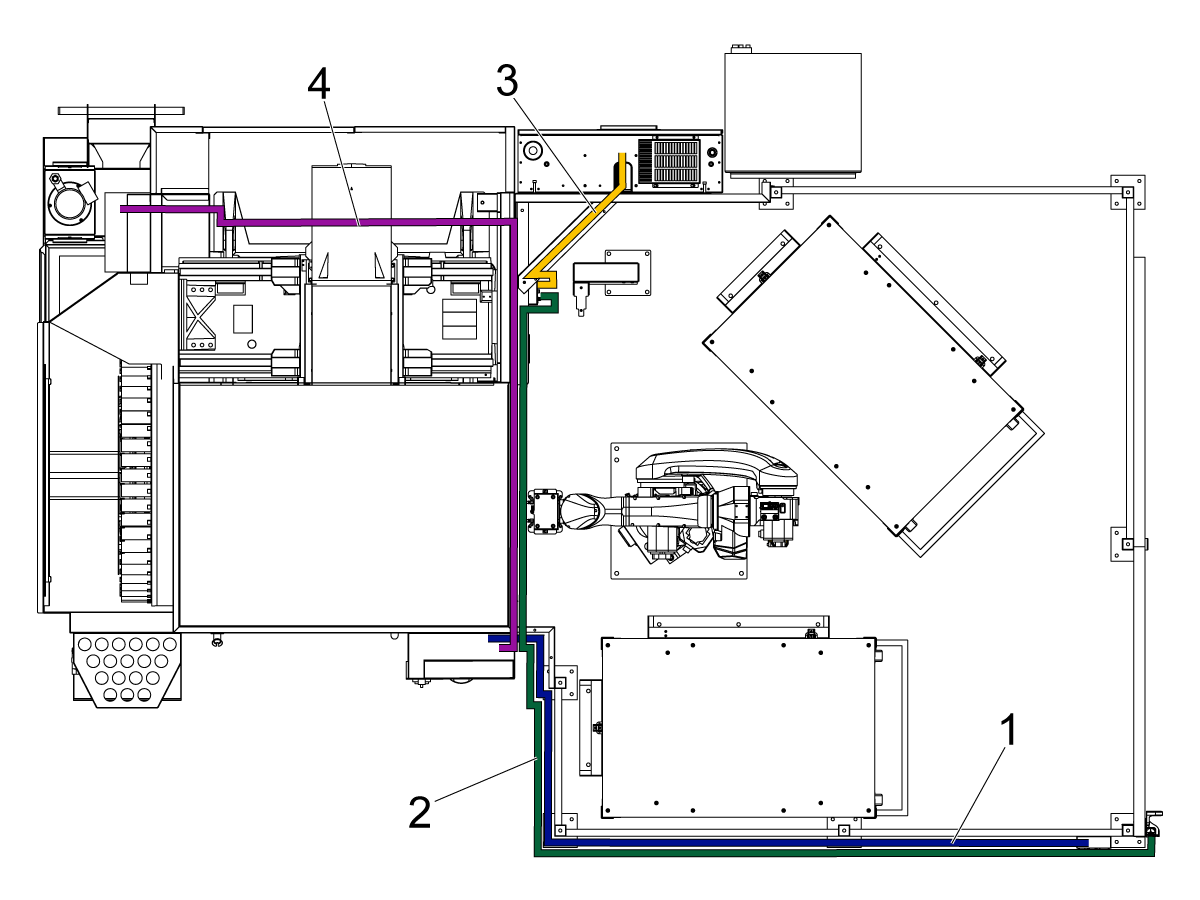
.png)