-
macchine
-
 Fresatrici verticali
Fresatrici verticali
Fresatrici verticali
Fresatrici verticali -
 Soluzioni multiasse
Soluzioni multiasse
Soluzioni multiasse
Soluzioni multiasse -
 Torni
Torni
Torni
Torni -
 Fresatrici orizzontali
Fresatrici orizzontali
Fresatrici orizzontali
Fresatrici orizzontali -
 Dispositivi rotanti e indexer
Dispositivi rotanti e indexer
Dispositivi rotanti e indexer
Dispositivi rotanti e indexer -
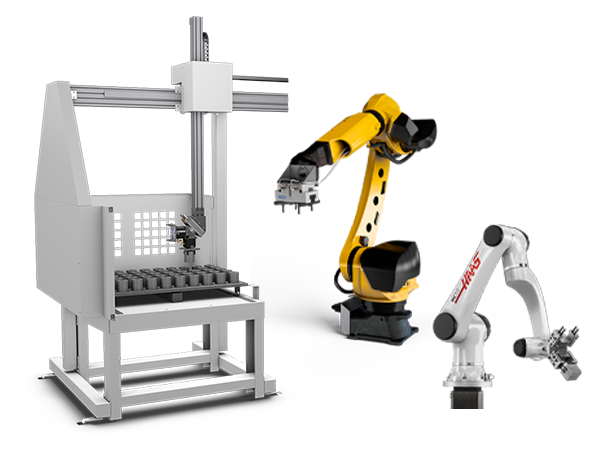 Sistemi di automazione
Sistemi di automazione
Sistemi di automazione
Sistemi di automazione -
 Macchine da tavolo
Macchine da tavolo
Macchine da tavolo
Macchine da tavolo -
 Attrezzatura da officina
Attrezzatura da officina
Attrezzatura da officina
Attrezzatura da officina
STRUMENTI DI ACQUISTOVUOI PARLARE CON QUALCUNO?Un Haas Factory Outlet (HFO) può rispondere alle tue domande e guidarti attraverso le migliori opzioni.
CONTACT YOUR DISTRIBUTOR > -
-
Opzioni
-
 Mandrini
Mandrini
Mandrini
Mandrini -
 Cambi utensile
Cambi utensile
Cambi utensile
Cambi utensile -
 4° | 5° Asse
4° | 5° Asse
4° | 5° Asse
4° | 5° Asse -
 Torrette ed utensili motorizzati
Torrette ed utensili motorizzati
Torrette ed utensili motorizzati
Torrette ed utensili motorizzati -
 Indagine tramite sonda
Indagine tramite sonda
Indagine tramite sonda
Indagine tramite sonda -
 Gestione di trucioli e refrigerante
Gestione di trucioli e refrigerante
Gestione di trucioli e refrigerante
Gestione di trucioli e refrigerante -
 Il controllo Haas
Il controllo Haas
Il controllo Haas
Il controllo Haas -
 Opzioni di prodotto
Opzioni di prodotto
Opzioni di prodotto
Opzioni di prodotto -
 Utensileria e fissaggio dei pezzi
Utensileria e fissaggio dei pezzi
Utensileria e fissaggio dei pezzi
Utensileria e fissaggio dei pezzi -
 Serraggio dei pezzi
Serraggio dei pezzi
Serraggio dei pezzi
Serraggio dei pezzi -
 Soluzioni a 5 assi
Soluzioni a 5 assi
Soluzioni a 5 assi
Soluzioni a 5 assi -
 Automazione
Automazione
Automazione
Automazione
STRUMENTI DI ACQUISTOVUOI PARLARE CON QUALCUNO?Un Haas Factory Outlet (HFO) può rispondere alle tue domande e guidarti attraverso le migliori opzioni.
CONTACT YOUR DISTRIBUTOR > -
-
Why Haas
Scopri la differenza di Haas
-
Assistenza
- Video
-
Utensili Haas
- Utensili Haas
-
Winner’s Circle
-
Winner’s Circle
-
Le offerte speciali di oggi
-
Liquidazione
-
Misurazione e ispezione
-
Cobot e accessori
-
Assistenza in officina
-
Portautensili per fresatrici
-
Utensileria fresatrice
-
Sistemi di alesatura
-
Serraggio dei pezzi fresatrice
-
Portautensili per tornio
-
Utensileria tornio
-
Serraggio dei pezzi nel tornio
-
Kit pacchetto
-
Collari e mandrini autocentranti ER
-
Foratura
-
Filettatura
-
Brocciatura
-
Cubi portapezzi
-
Autocentranti manuali per fresatura
-
Utensili di rimozione sbavature e abrasivi
-
Presetter utensili e macchine per termoretrazione
-
Stoccaggio degli utensili
-
Manutenzione della macchina
-
Accessori macchine utensili
-
Equipaggiamento e accessori
 Accessori di automazione
Accessori di automazione
 Assistenza all’officina
Assistenza all’officina
 Portautensili per fresatrici
Utensili da taglio per la fresatrice
Portautensili per fresatrici
Utensili da taglio per la fresatrice
 Sistemi di alesatura
Sistemi di alesatura
 Serraggio dei pezzi fresatrice
Serraggio dei pezzi fresatrice
 Portautensili per tornio
Utensili da taglio per il tornio
Portautensili per tornio
Utensili da taglio per il tornio
 Serraggio dei pezzi tornio
Serraggio dei pezzi tornio
 Kit pacchetti
Kit pacchetti
 Collari e autocentranti ER
Foratura
Filettatura
Collari e autocentranti ER
Foratura
Filettatura
 Brocciatura
Brocciatura
 Cubi portapezzi e kit
Cubi portapezzi e kit
 Autocentranti manuali per fresatura
Autocentranti manuali per fresatura
 Sbavatura e abrasivi
Presetter utensili e macchine per termoretrazione
Sbavatura e abrasivi
Presetter utensili e macchine per termoretrazione
 Stoccaggio e maneggiamento
Stoccaggio e maneggiamento
 Manutenzione della macchina
Manutenzione della macchina
 Accessori macchine utensili
Accessori macchine utensili
 Equipaggiamento e accessori
Equipaggiamento e accessori
 Misurazione e ispezione
Misurazione e ispezione
 Winner's Circle
Winner's Circle
Winner's Circle
Winner's Circle
 Liquidazione
Liquidazione
 Le offerte speciali di oggi
Le offerte speciali di oggi












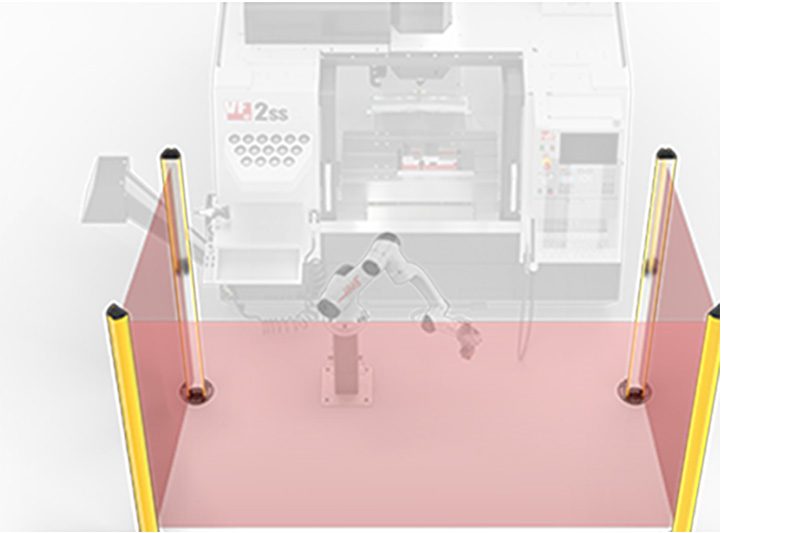
-setup/dcs_robot_arm_dsc_zones.png)

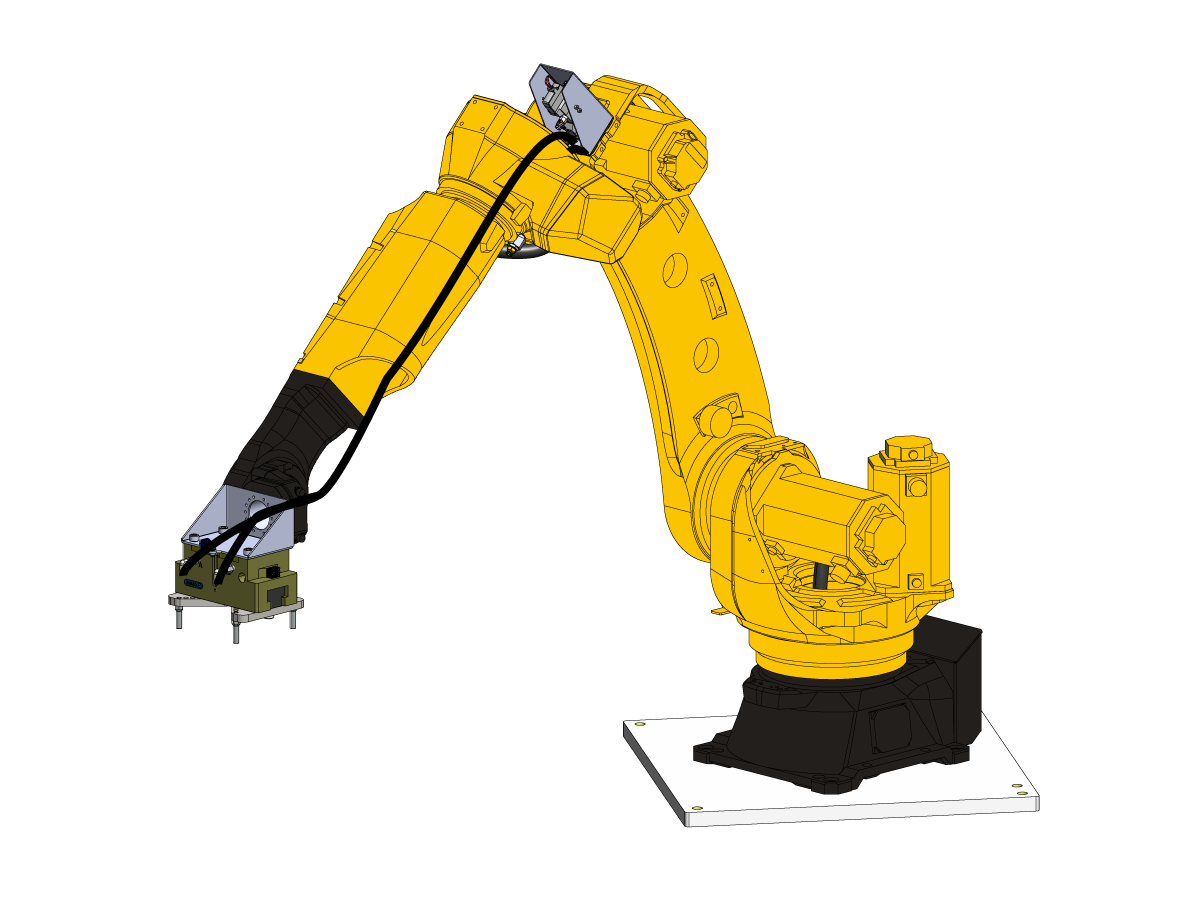
---vertical---installation/2019-10-08_15h56_48.jpg)

.png)
.png)